





























Chapter IV Function Parameter Table
87
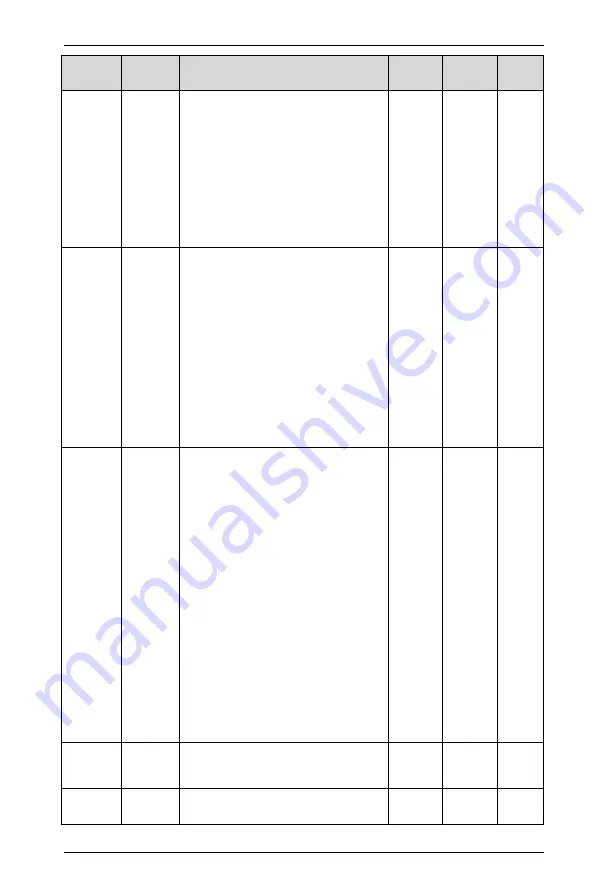
Parameter
Code
Parameter
name
Parameter detailed description
Minimum
Unit
Factory
value
Change
delay
interval between the end of drive data
receiving and the sending of response data
to the host computer. If the response delay
is less than the system processing time,
the response delay is based on the system
processing time. If the response delay is
greater than the system processing time,
after the system has processed the data, it
must wait until the response delay time is
reached before sending data to the host
computer.
Fb.04
Communic
ation
timeout
detection
time
Set range: 0.0
~
100.0s
If the communication timeout fault time is
set to 0, this function is invalid. If the
time interval between two
communications exceeds the
communication timeout fault time, the
system reports a communication fault
E016, and the communication condition
can be monitored.
Usually, it is set to invalid. If this
parameter is set in a continuous
communication system, the
communication condition can be
monitored.
0.1s
0.0s
×
Fb.05
Master
send
selection
LED unit digit
:
Running status of the
current master
0
:
disable
1
:
enable
LED tenth digit
:
Current running
frequency of the master
0
:
disable
1
:
enable
1
、
When the drive is set as the
communication master (Fb.00 is set to 0),
it can send data to the slave computer. At
this point, the master inverter sends a
broadcast command, and all slaves
receive the command sent by the master.
2
、
The master can send a maximum of
two frames of data in polling mode. If this
parameter is set to invalid, the master
does not send data.
Note: Only RTU communication mode
supports master sending.
11
11
×
Fb.06
Network
interface
enable
0
:
disable
1
:
enable
1
0
○
Fb.07
Network
protocol
0
:
Modbus TCP protocol
1
:
Firmware Upgrade Protocol
1
0
○