





























Chapter IV Function Parameter Table
70
Parameter
Code
Parameter
name
Parameter detailed description
Minimum
Unit
Factory
value
Change
speed up the system's dynamic response,
but if the gain is too large, the system is
easy to generate oscillation; reducing the
integration time can speed up the system's
dynamic response, but if the integration is
too small, the system overshoot is large
and is easy to generate oscillation.
Usually, the proportional gain is adjusted
first to maximize under the premise that
the system is not oscillating; then the
integration time is adjusted to make the
system have a fast dynamic response and
reduce the system overshoot.
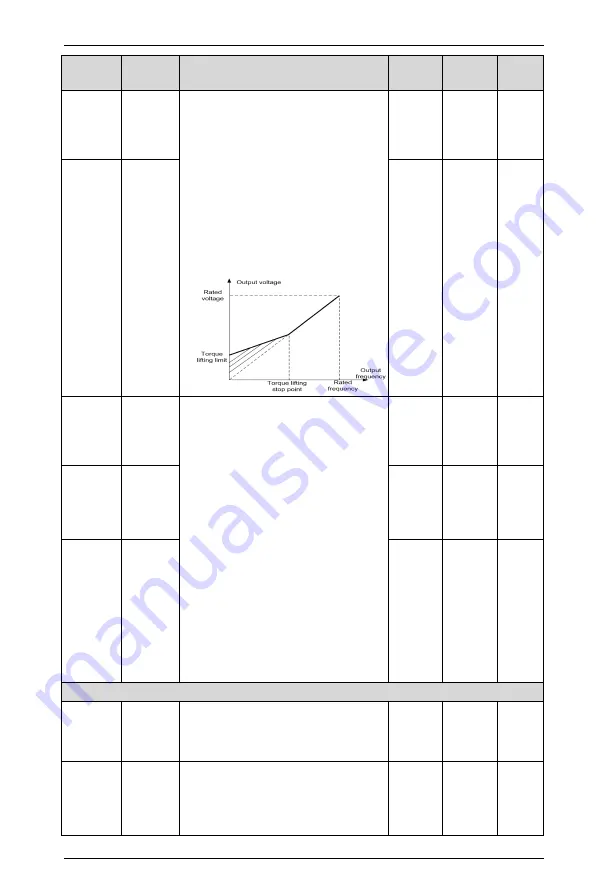
F7.27
Torque
boost
integral
time 2
1ms
500ms
○
F7.28
Automatic
torque
boost
factor
1%
30%
○
F7.29
Motor
oscillation
suppressio
n methods
F7.29 set range: 0
~
1
F7.30 set range: 0
~
1000
F7.31 set range: 0
~
10000ms
In V/F control mode, it is easy to generate
current oscillation at certain frequency. In
minor cases, the motor can have an
unstable operation, in serious cases, it will
cause the drive overcurrent. The
oscillation suppression function is used to
suppress the natural oscillations generated
when the drive cooperates with the motor.
If the output current changes repeatedly
during the constant load operation, by
properly adjusting the oscillation
suppression parameters, based on the
factory parameters, F7.29=0 Suppress
oscillations by adjusting output
frequency;
F7.29=1 Suppress oscillations by
adjusting output voltage.
1
0
○
F7.30
Motor
oscillation
suppressio
n
coefficient
1
Model
determina
tion
○
F7.31
Motor
oscillation
suppressio
n filter
time
1ms
100ms
○
Group F8: PID control parameters
F8.00
PID
operation
control
selection
0: Disable (Ready mode)
1: Enable (Ready mode)
1
0
×
F8.01
Target
value
channel
selection
When the frequency input channel is
selected to 8, the drive operation mode is
process PID control.
0: F8.05 digital input;
1: AI1;
1
0
×