





























089
F3 Encoder and Zero-servo Parameter
F3.00
PG pulses per revolution (reserved)
1 ~ 9999
1024
F3.01
Motor and encoder speed ratio (reserved)
0.001 ~ 65.535
1.000
F3.02
PG rotation direction (reserved)
0 ~ 1
0
F3.03
PG signal filtering time (reserved)
0.00 ~ 10.00s
0.10
F3.04
PG disconnection detection time
(reserved)
0.1 ~ 10.0s
2.0
F3.05
PG disconnection action (reserved)
0 ~ 1
0
F3.06
Zero-speed detection value (reserved)
0.0 (forbid disconnection
protection)
0.1 ~ 999.9rpm
0.0
F3.07
zero-servo control function (reserved)
0 ~ 2
0
F3.08
zero-servo position loop proportional
gain (reserved)
0.000 ~ 6.000
2.000
F4.00
Speed loop (ASR1) ratio gain
0.000 ~ 6.000
1.000
F4.01
Speed loop (ASR1) integral time
0.000 ~ 32.000s
1.000
F4.02
ASR1 filter time constant
0.000 ~ 0.100s
0.000
F4.03
Switch low point frequency
0.00Hz ~【F4.07】
5.00
F4.04
Speed loop (ASR2) proportional gain
0 ~ 6.000
1.500
F4.05
Speed loop (ASR2) integral time
0.00 ~ 32.000s
0.500
F4 Speed Loop, Torque and Flux Control
Parameter
Function codes F4.00 ~ F4.07 are valid in no
PG vector control mode.
In vector control mode, change speed
response character by setting proportional
gain P and integral time I of speed regulator.
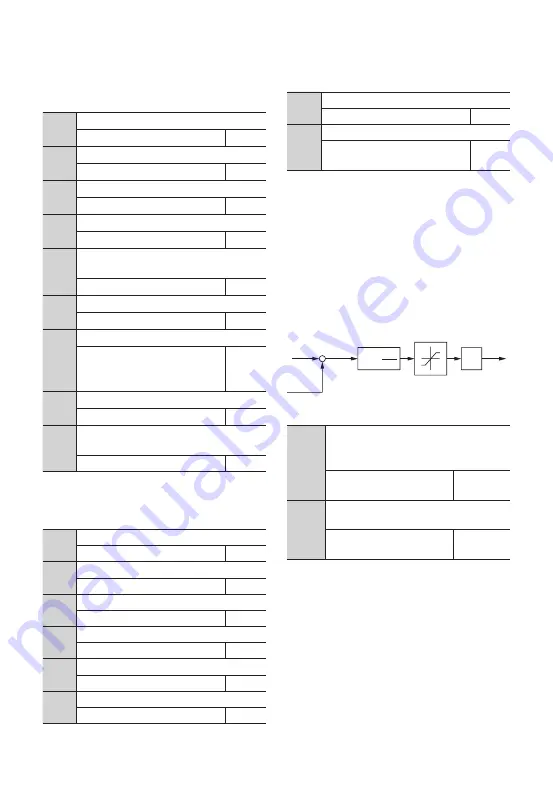
1. Speed regulator (ASR) has structure as
showed in figure F4-1. KP is proportional gain
P, TI is integral time I.
Fig. F4-1 Speed Regulator
In vector control mode, these above function
codes are used to adjust steady-speed
precision of motor. When motor is overload
and the speed is low, increase the parameter,
otherwise decrease the parameter.
Positive slip compensation factor works for
the speed when motor slip ratio is positive,
and negative slip compensation factor works
for the speed when motor slip ration is
negative.
F4.08
Vector control positive slip
compensation factor (motoring
condition)
50.0% ~ 200.0%*rated
slip freq.
100.0%
F4.09
Vector control negative slip
compensation factor (braking state)
50.0% ~ 200.0%*rated
slip freq.
100.0%
'SFR
TQFFE
$PNNBOE
4QFFE&SSPS
5PSRVF-JNJU
5PSRVF$VSSFOU
4QFDJGZ
0VUQVU
'JMUFS
8BWF
"DUVBM
4QFFE
,
1
5
J
4
4.2 Detailed Function Description
F4.06
ASR2 filer time constant
0.000 ~ 0.100s
0.000
F4.07
Switch high point frequency
【F4.03】~【F0.16】upper
limit freq.
10.00
Summary of Contents for SKI600
Page 3: ......
Page 4: ...88888 Operating Instruction Manual High performance Vector Inverter ...
Page 179: ......
Page 180: ......







































































