





























Note
Action
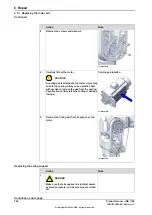
xx1800003289
Jog the robot to the specified position:
•
Axis 1: 0°
•
Axis 2: 110° (IRB 1100-4/0.475) /95° (IRB
1100-4/0.58)
•
Axis 3: -20° (IRB 1100-4/0.475)/ -6° (IRB
1100-4/0.58)
•
Axis 4: 0°
•
Axis 5: 0°
•
Axis 6: No significance.
2
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
3
Removing the axis-2 motor
Note
Action
DANGER
Make sure that all supplies for electrical power,
hydraulic pressure, and air pressure are turned
off.
1
xx1800002488
Remove the swing support cover.
2
Continues on next page
282
Product manual - IRB 1100
3HAC064992-001 Revision: C
© Copyright 20192020 ABB. All rights reserved.
5 Repair
5.5.1 Replacing the lower arm
Continued
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 588: ...This page is intentionally left blank ...
Page 610: ...This page is intentionally left blank ...
Page 614: ......
Page 615: ......







































































