





























M2DC Series Hardware Manual
66
Rev. 1.1
2018/04
400-820-9661
6 Preoperational mode
When using preoperational mode, disconnect the servo motor from any mechanical system to prevent
damages and accidents. Preoperational mode should be used only under a no load condition.
6.1 Inspection Before Trial Run
To avoid any accidents and damages to the servo drive and mechanical systems, the following safety
checks are recommend before the drive is turned on.
•
Connection inspections
- Ensure secure wiring for power connector P1, motor connector P2, encoder connector CN3, and
communication connector CN1. Check the wiring connections, and that wires are correctly insulated (to
avoid short circuits) for all connectors.
- Make sure the ground wire from power connector P1, and motor connector P2 are securely connected
to the shield ground.
• Power supply inspection - Ensure the power supply to V+ and V- meet the drive’s power supply
specifications.
•
Check that the servo drive and motor are securely installed.
•
Make sure no load is connected to the servo motor.
6.2 Trial Run Procedure
Step
Details
Description
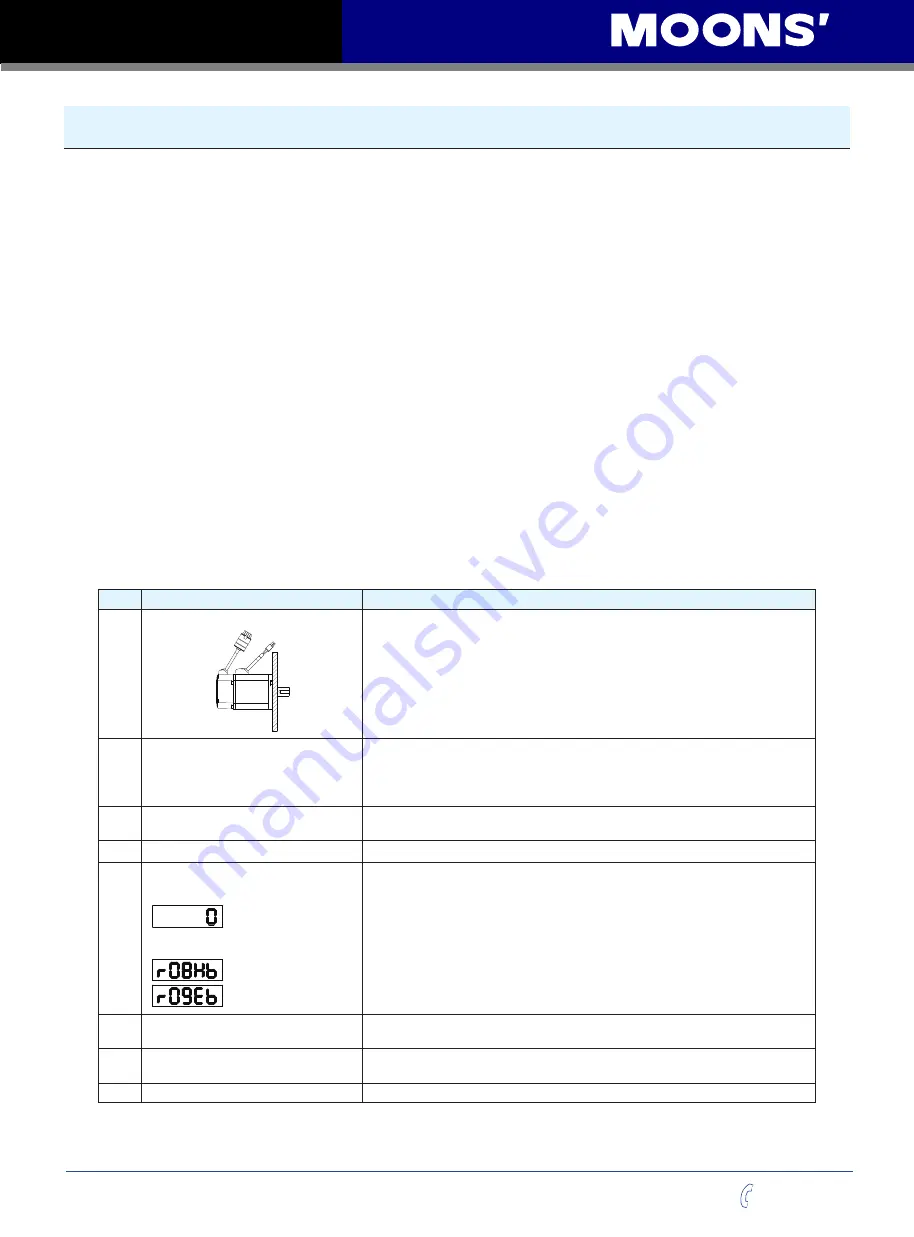
1
Install the motor securely.
- The motor can be installed on the machine.
- Ensure no load is installed on the servo motor.
2
Make sure the wiring between the
drive and motor is correct.
- The terminals on connector P2 must be connected in the order of U - Red,
V - Yellow, U - Blue, FG - Yellow/Green. If the terminals are not connected to the
specified wire, the drive will not be able to control the motor.
- Ensure the encoder cable is connected to CN2 correctly.
3
Make sure the main power circuit is
wired correctly.
Refer to Section 4.1 Connecting to Peripheral Devices to confirm the correct main
power circuit wiring.
4
Supply power
Do n
o
t apply more than 75V power supply to the servo system.
5
If there are no alarms the LED Display
will read:
If an alarm occurs, it will display:
- When the power is on, the normal display should be shown without any alarm
codes and the drive is disabled.
- If the display shows alarm codes such as r-08 and r-09 the encoder feedback
connection is incorrect. Check the encoder wiring to the servo motor to see if it is
loose or incorrect.
- See Section 10.1 for a list of alarm codes.
6
Set up a motor brake control circuit if
using an electromagnetic brake motor.
Please refer to Section 4.4 for more details about the Electromagnetic Brake.
7
Motor Configuration
Configure the drive for the correct motor through M Servo Suite or the
operation panel.
See Section 6.3 Motor Configuration.
8
JOG Trial Run without load
The system is ready to run JOG trial if all the above steps are completed.