





























121
Rev. 1.1
2018/04
400-820-9661
M2DC Series Hardware Manual
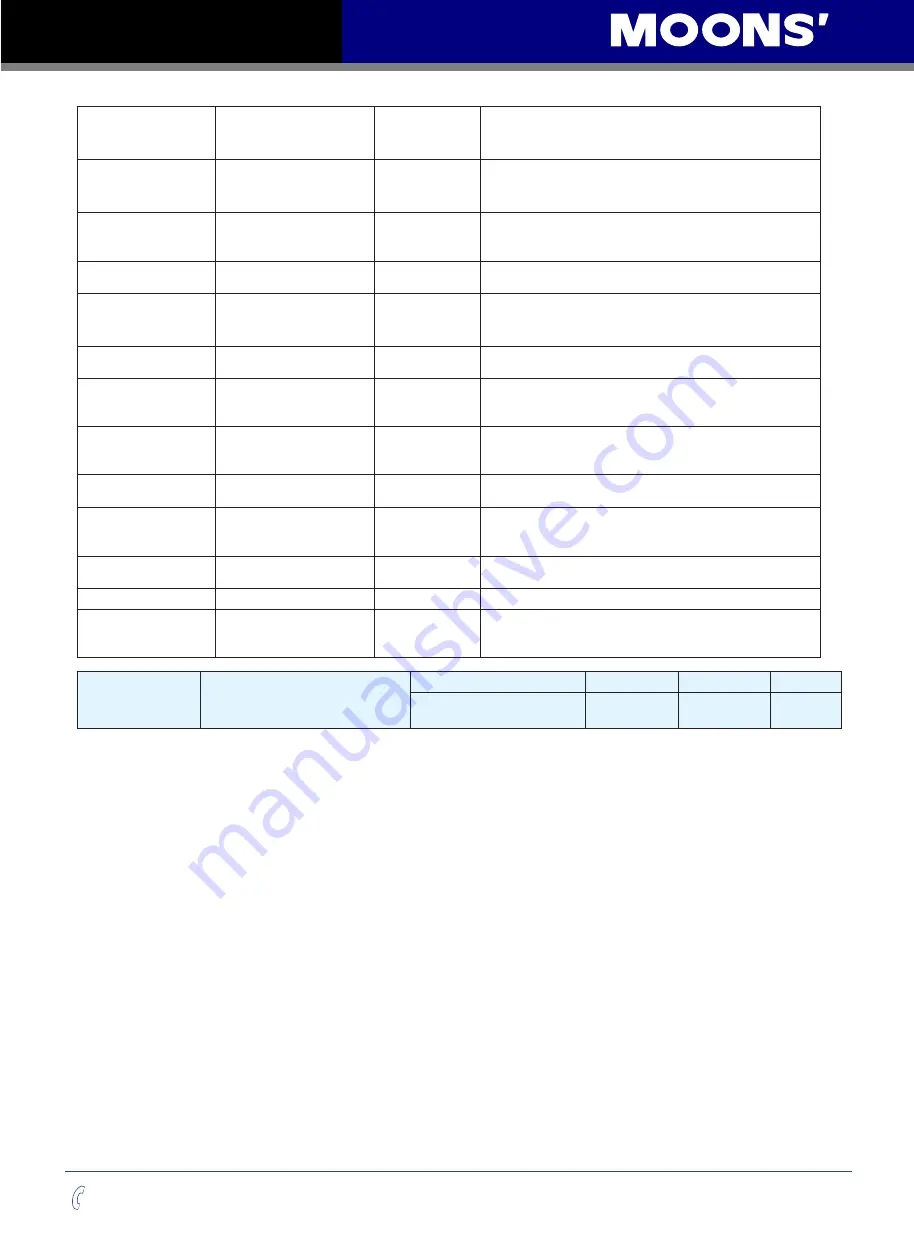
Analog input torque
mode
+10 - -10V analog signal
6
Analog torque mode: X1 for run/stop signal;
X2 is open, motor will change its current rotary
direction.
Analog input torque
mode
+10 - -10V analog signal
8
Analog torque mode: X1 for run/stop signal;
X2 is closed, motor will change its current rotary
direction.
Digital pulse position
mode
STEP & Direction;
CW/CCW Pulse; A/B
Quadrature.
7
Up to 500KHz open collector input signal or up to
2MHz differential input signal.
Command velocity
mode
SCL command
10
Use SCL command to control motor rotation velocity.
Analog velocity mode
+10 - -10V analog signal
11
Using external analog voltage input to motor velocity.
Analog velocity mode, no run/stop signal, X2 is
direction switch.
Analog velocity mode
+10 - -10V analog signal
12
Analog velocity mode, X1 is run/stop signal, X2 is
direction switch
Velocity mode
Digitial input signal
15
Profile velocity mode, after drive is enabled. The drive
will run at velocity set by P-21 (JS). No run/stop signal,
X2 is direction switch.
Velocity mode
Digitial input signal
16
Profile velocity mode, after drive is enabled. The drive
will run at velocity set by P-21 (JS). N run/stop signal,
X2 is direction switch.
Multi velocity mode
Digitial input signal
17
Profile velocity mode, no run/stop signal. X2 is direction
switch. X10, X11, X12 are speed selection switches.
Multi velocity mode
Digitial input signal
18
Profile velocity mode, X1 is run/stop switch. X2 is
direction switch. X10, X11, X12 are speed selection
switches.
Point to point Velocity
SCL command
21
Use SCL command to control point to point position
mode.
Analog position mode
+10 - -10V analog signal
22
Use analog input voltage signal for position control .
Position table
Internal position mode
25
There are two motion control mode: linear motion with
maximum of 64 position set points, and rotary motion
with maximum of 32 position division points.
P-13 (CN)
Secondary control mode
Data Range
Default
Unit
Data type
1~8,11,12,
15~18,21,22,25
21
------
DEC
Servo drive’s secondary control mode. Refer to P-12 (CM) main control mode, and Section 7.1.5 Control
Mode Selection.







































































