





























13.7.2 PID Function Digital-Input
z
DIx_Select
Æ
70,PID --> ENABLE PID Block
When select this function,enable PID block。
13.7.3 PID Function Digital-Output
13.7.4 PID Function Block
PID Set
PID Pilot
PID Error
PID Process
P Gain
I Gain
PID Output
PID Enable DIx(70)
PID block compare with PID-Set and PID-Pilot,and produce the result:PID-Error
Formule:
----------------(1-1)
dt
∫
Error
Igain
Pgain
Error
Output
PID
+
×
=
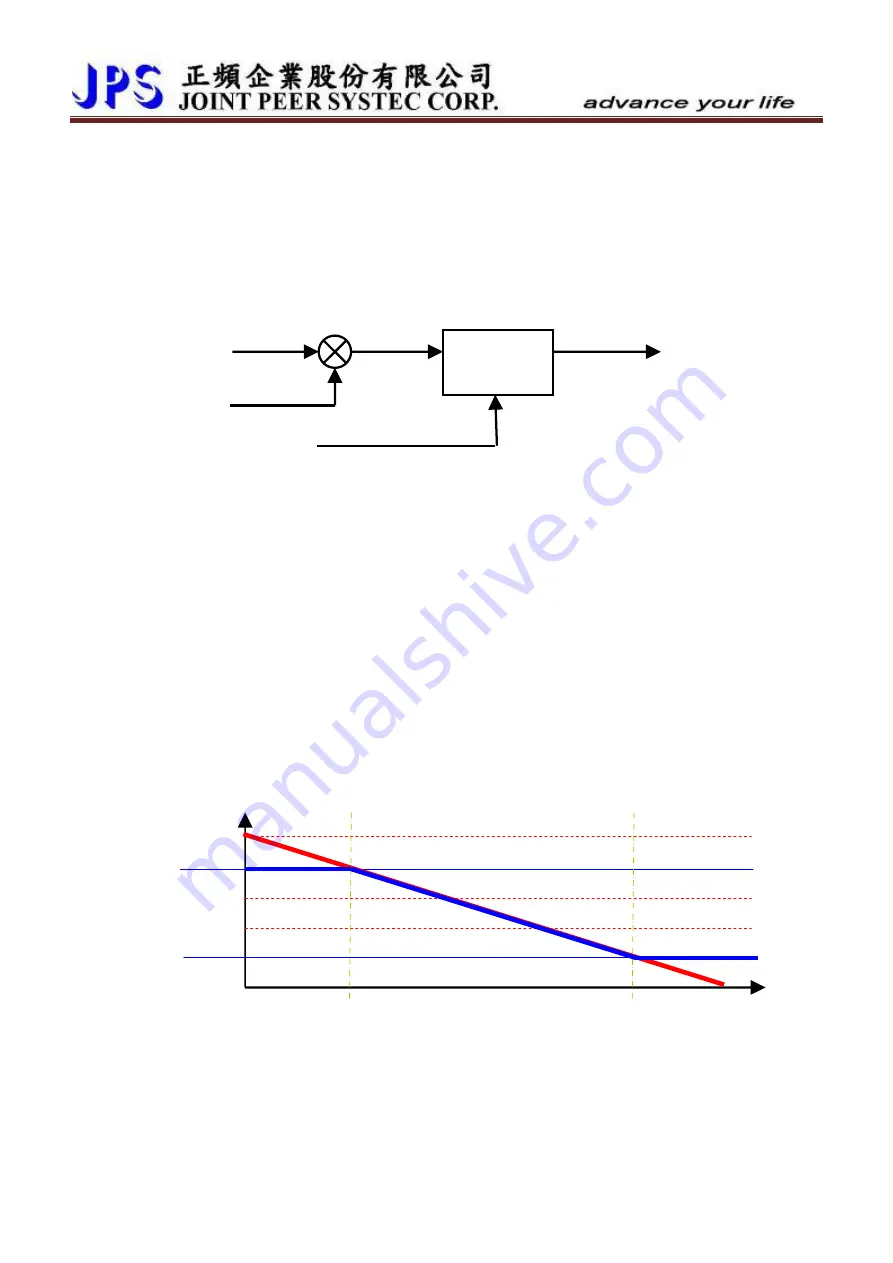
【Example】:
Pr.128:Motor Maximun speed limit = 1000
Pr.297:PID-switch point = 80.20
Î
XX =(800/1000)×100% = 80%;YY =(200/1000)×100% = 20%
Pr.255:PID P- gain1 = 500
Pr.256:PID I - gain1 = 50
Pr.295:PID P-gain2 = 100
Pr.296:PID I - gain2 = 10
※ When actually speed > 800rpm,main gain = PID- Gain1
※ When actually speed < 200rpm,main gain = PID-Gain2
※ When actually speed between 200rpm ~ 800rpm,main gain = linear adjustment。
Rpm
1000
www.jps.com.tw
83
PID High Gain
20%
800
600
400
200
PID Low Gain
80%
Содержание IRIS-IMSV
Страница 1: ...IRIS IMSV DRIVER USER MANUAL Version V5 03 ...
Страница 95: ...16 CE Certificate 16 1 EMC Certificate www jps com tw 94 ...
Страница 96: ...16 2 LVD Certificate www jps com tw 95 ...







































































