




























z
Pr.160
Î
2’nd Speed Loop Gain Switch Point
z
Pr.161
Î
2’nd Speed Loop P-gain
z
Pr.162
Î
2’nd Speed Loop I-gain
z
Pr.163
Î
2’nd Speed Loop Filter Level
These are the 2’nd PI tuning parameter for close loop control.
【NOTE】If Pr.163 set too large, the response will be low, and the system will be unstable.
Pr.161 should keep larger then Pr.162.
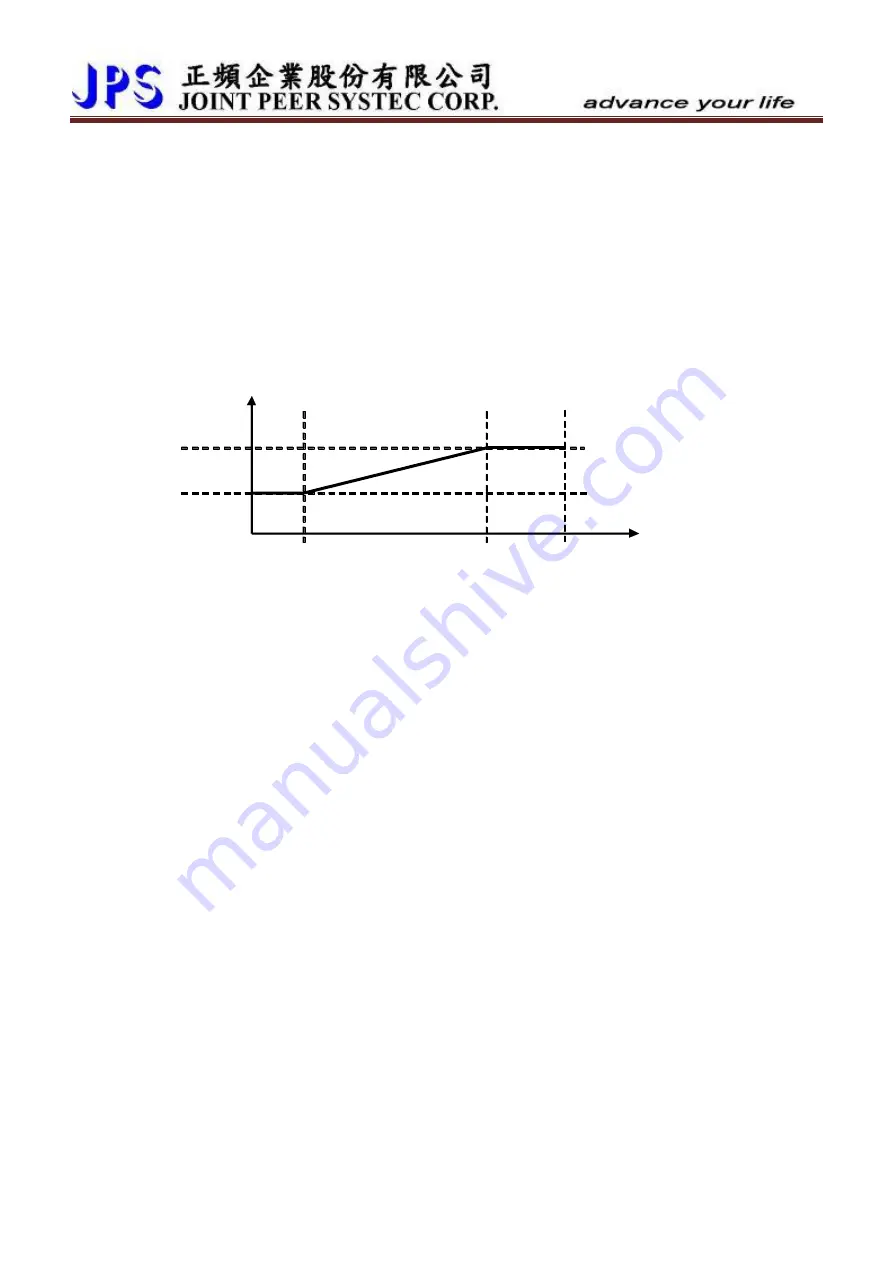
Example: If set
z
Pr.029=300rpm
z
Pr.160=1500rpm
rpm
1500
Gain
300
Max rpm
1’st Gain
2’nd Gain
1.
When speed start from 0rpm to 300rpm (under the 1’st gain switch point), the driver
uses the 1’st PI tuning parameters for close loop control.
2.
When speed is in the range of 300 ~ 1500rpm, the driver will change the PI tuning
parameters’ value from 1’st to 2’nd by linear manner.
3.
When speed exceeds 1500rpm, the driver uses 2’nd PI tuning parameters for close loop
control.
www.jps.com.tw
51
Содержание IRIS-IMSV
Страница 1: ...IRIS IMSV DRIVER USER MANUAL Version V5 03 ...
Страница 95: ...16 CE Certificate 16 1 EMC Certificate www jps com tw 94 ...
Страница 96: ...16 2 LVD Certificate www jps com tw 95 ...







































































