





























Chapter 2 Installation and Connections
2-6
2-3-2
Installation base
To mount the robot, use an installation base that satisfies the following conditions.
1) The installation base is subjected to a great deal of stress while the robot is in operation.
Prepare a sufficiently rigid and stable installation base, taking into account the robot weight
including the end effector (gripper) and workpiece.
CAUTION
If the installation base is not sufficiently rigid and stable, vibration (resonance) may
occur during operation, causing adverse effects on the robot work.
2) The installation base surface must be machined within a flatness of
±
0.05mm/500mm.
CAUTION
The robot positioning accuracy might decrease if the installation surface precision is
insufficient.
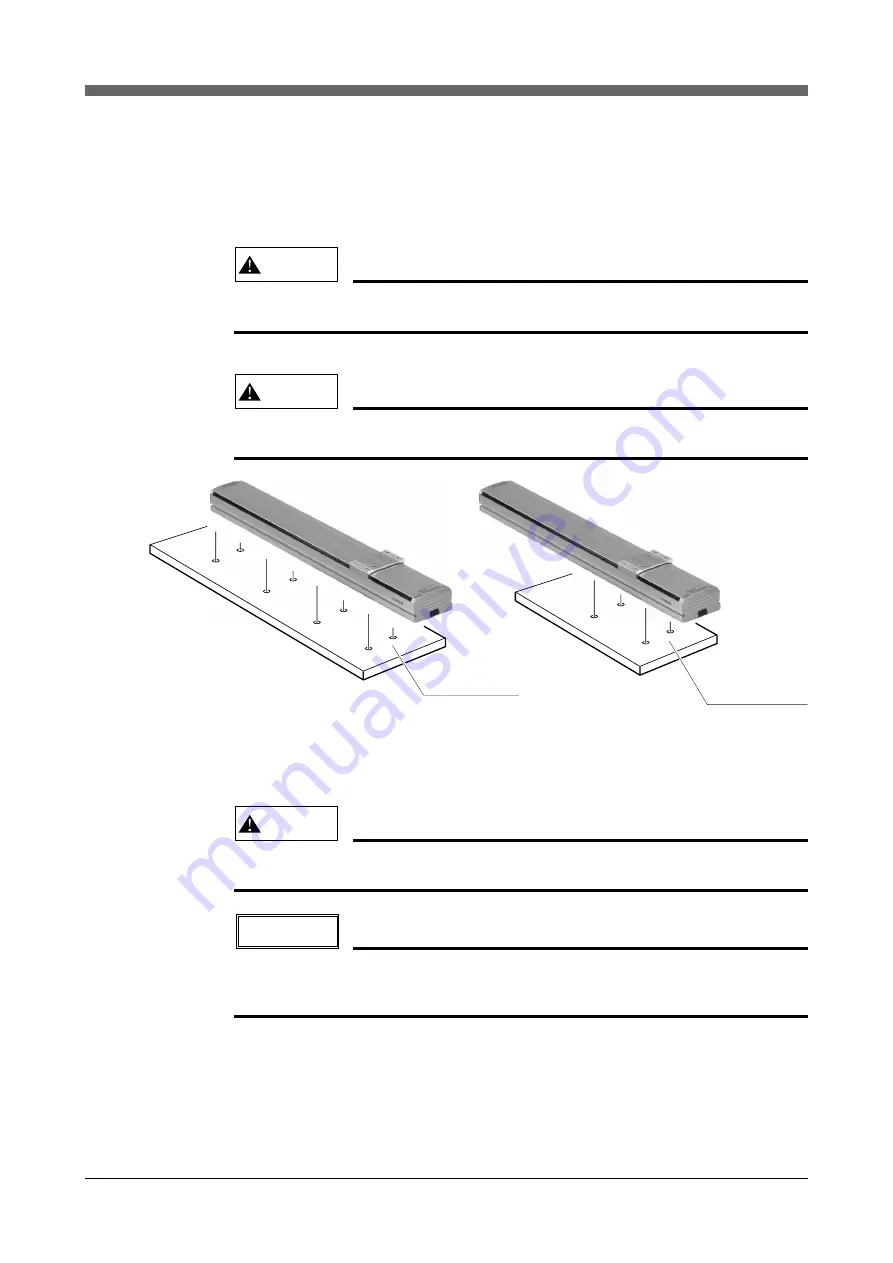
3) Use an installation base of sufficient size to match the robot body so that the robot can be
installed with the specified number of bolts. Avoid installing the robot with less than the
specified number of bolts or installing the robot closer to one end as shown at the lower right.
CAUTION
Using less than the specified number of bolts to install the robot may cause vibration
and poor positioning accuracy.
NOTE
Refer to the external view and dimensions for each robot model shown in “4.1 Robot
specifications” for machining dimensions and positions of screw holes.
• Ensure that the controller is off before connecting the robot cable to the controller.
Bad example
Installation base
Good example
Installation base
Summary of Contents for FLIP-X Series
Page 1: ...User s Manual ENGLISH E YAMAHA SINGLE AXIS ROBOT E21 Ver 1 15 FLIP Xseries ...
Page 2: ......
Page 6: ...MEMO ...
Page 10: ...MEMO ...
Page 12: ...1 2 MEMO ...
Page 24: ...1 14 MEMO ...
Page 26: ...2 2 MEMO ...
Page 66: ...3 2 MEMO ...
Page 78: ...4 2 MEMO ...
Page 98: ...4 22 MEMO ...
Page 100: ...5 2 MEMO ...
Page 120: ...5 22 MEMO ...
Page 121: ...Chapter 6 Troubleshooting 6 1 Positioning error 6 3 6 2 Feedback error 6 4 ...
Page 122: ...6 2 MEMO ...
Page 125: ...Appendix About machine reference iii Equation of moment of inertia calculation iv ...
Page 126: ...ii MEMO ...