The gray value of an image point (image point = pixel) can
assume values between 0 and 255:
■
0: black
■
255: white
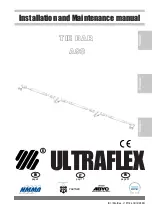
Surfaces that are very bright under the camera have high gray
values and surfaces that are dark have lower gray values:
A
Actual light conditions under the camera (=part)
B
Digital image with gray scale values
Fig. 51547
The cameras can be used within an light wavelength range of
400 - 1000 nm (visible range: 380 nm/blue – -760 nm/red).
The aim of the approximate position is to define the position of
the individual part stacks. This is done with the coarse position
recognition process and the camera pictures used for this pur-
pose.
The image section of the camera for the approximate position is
about 0.9 m x 0.6 m. In order for the area defined by the opera-
tor to be covered nevertheless, this area is divided into n over-
lapping segments. Individual pictures are taken from all seg-
ments and subsequently joined to form an image of the approxi-
mate position in the PC.
4
‐
114
Error handling
2015-06-01
B579EN
Rough position
Summary of Contents for BendMaster 150
Page 1: ...Operator s manual BendMaster TruBend Cell 5000...
Page 2: ......
Page 3: ...Operator s manual BendMaster TruBend Cell 5000 Original operator s manual Edition 2015 06 01...
Page 6: ...II Before you proceed 2015 06 01 B579EN...
Page 16: ...0 10 Table of contents 2015 06 01 B579EN...
Page 44: ...1 28 Disassembly and disposal 2015 06 01 B579EN...