





























4
-
4
Continuing from the previous page
*When pulses output from the encoder are used
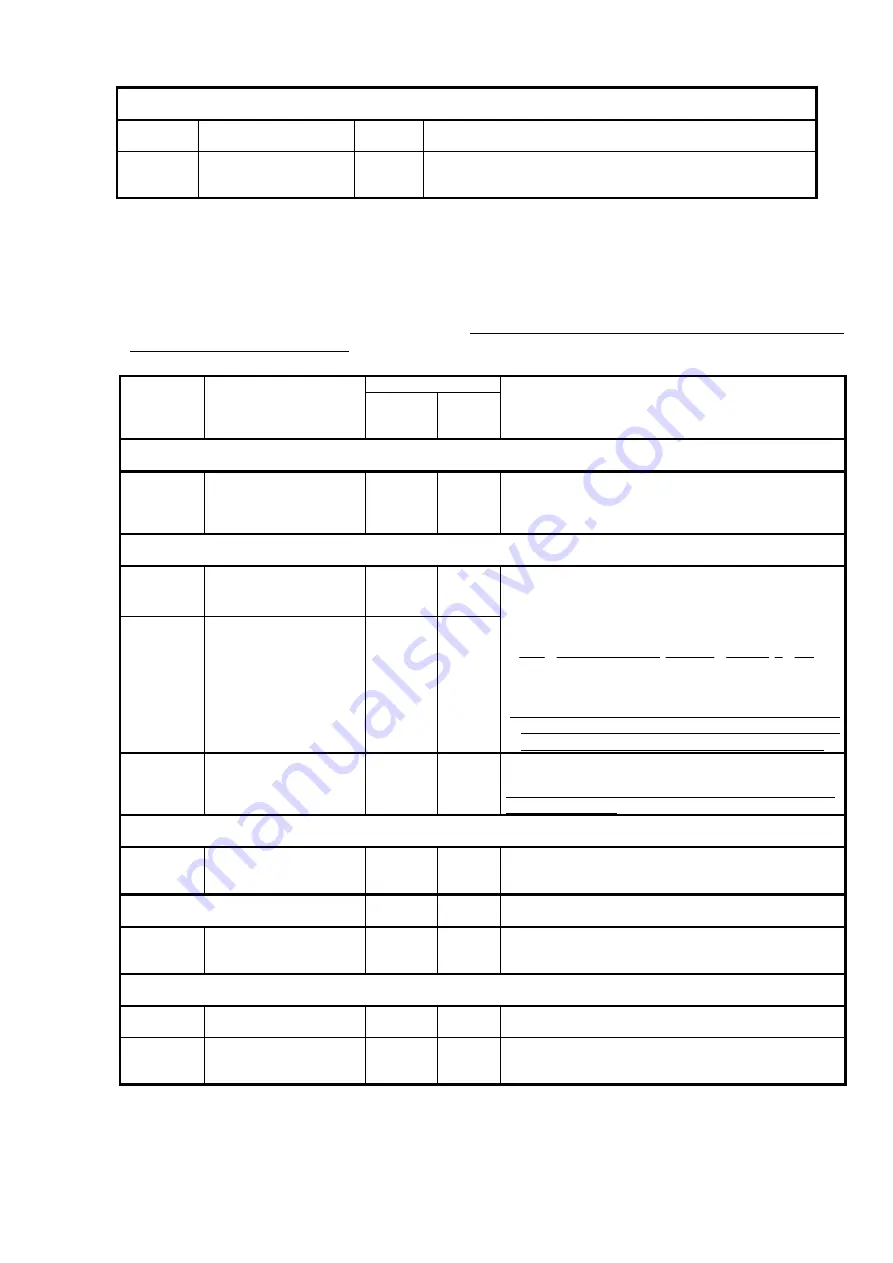
PA15
Encoder output pulse
4
(Note 4)
Select the encoder pulse (phase A or phase B) output from the servomotor.
PC19
Selection of encoder output pulse
setting
0□1□h
(Note 4)
Selection of encoder output pulse setting
Set up the encoder pulse output from the servo amplifier. The setting shown in the
left-side column is a setting of a division ratio.
Note 4
This is an example of the case where the output pulse setting of the existing HC-KFS motor (with the encoder resolution of 131072 pulse/rev) is "Division ratio: 1/4".
(2)In the Case of Secondary Replacement
* Listed below in the table are the parameters you, at least, need to set up when performing a secondary
replacement. You may need to set up parameters other than the parameters listed below depending on the setting
of the existing amplifier. For the details, see "Guide for Replacing MR-J2S/J2M Series with J4 Series
L(NA)03093", Part 2, Section 3.5.
Setting
Parameter No.
Setting Item
Before
Change
(Note 1)
After
Change
Description
*Required
PC22
Function selection C-1
□1□□h
□0□□h
Selection of the serial encoder
Set up the communications with the encoder of MR-J4. If you do not make a
correct setting, the encoder causes an initial communication data error (AL
16.1).
*For position control mode only
PA06
Electronic gear numerator (CMX)
(Numerator of the increment of the
command input pulse)
8
(Note 2)
256
PA07
Electronic gear denominator (CDV)
(Denominator of the increment of
the command input pulse)
1
(Note 2)
1
If you use an electronic gear, you need to change the setting.
If you perform a secondary replacement, follow the equation below to
calculate the setting:
1
256
=
1
8
・
131072
4194304
=
従来CDV
従来CMX
・
エンコーダ分解能
タ
J2S用サーボモー
-
MR
エンコーダ分解能
置換えサーボモータ
=
CDV
CMX
* If the motor is equipped with a decelerator, the actual gear ratios of the
motors before and after replacement may be different. If the actual gear
ratios are different, consider the actual gear ratio to make the setting.
PA10
In-position range
100
3200
Specify the range of the accumulated pulse to output the
positioning-completed signal (INP).
Multiply the value of parameter No. 5 of the MR-J2S-_A servo amplifier by
32, and specify this value.
*For speed control mode only
PC12
Maximum rotational speed of analog
speed command
0
3000
Maximum rotational speed of analog speed command
The setting in the left-side column is of the case where the HC-SFS53
motor is replaced by the HG-SR52 motor.
*For torque control mode only
PC12
Maximum rotational speed of analog
speed limit
0
3000
Maximum rotational speed of analog speed limit
The setting in the left-side column is of the case where the HC-SFS53
motor is replaced by the HG-SR52 motor.
*When encoder output pulses are used
PA15
Encoder output pulse
4
(Note 3)
128
Select the encoder pulse (phase A or phase B) output from the servo amplifier.
You need to set up the output pulse.
PC19
Selection of encoder output pulse
setting
0□1□h
(Note 3)
1□1□h
Selection of encoder output pulse setting
Set up the encoder pulse output from the servo amplifier. The setting shown
in the left-side column is a setting of a division ratio.
Note 1 This is an example of the setting at the time of a primary replacement.
Note 2 This is an example of the case where the electronic gear of the existing servo amplifier is set to "8/1" with the existing servomotor (with the encoder
resolution of 131072 pulse/rev).
Note 3 This is an example of the case where the output pulse setting of the existing HC-KFS motor (with the encoder resolution of 131072 pulse/rev) is "Division
ratio: 1/4".
Encoder resolution of
replacing servomotor
Encoder resolution of
servomotor for MR-J2S
Current
CMX
Current
CDV
4 - 4
Summary of Contents for MR-J2S CP-S084 Series
Page 9: ...A 8 MEMO A 8 ...







































































