





























4
-
3
4.2
Setting Up Parameters
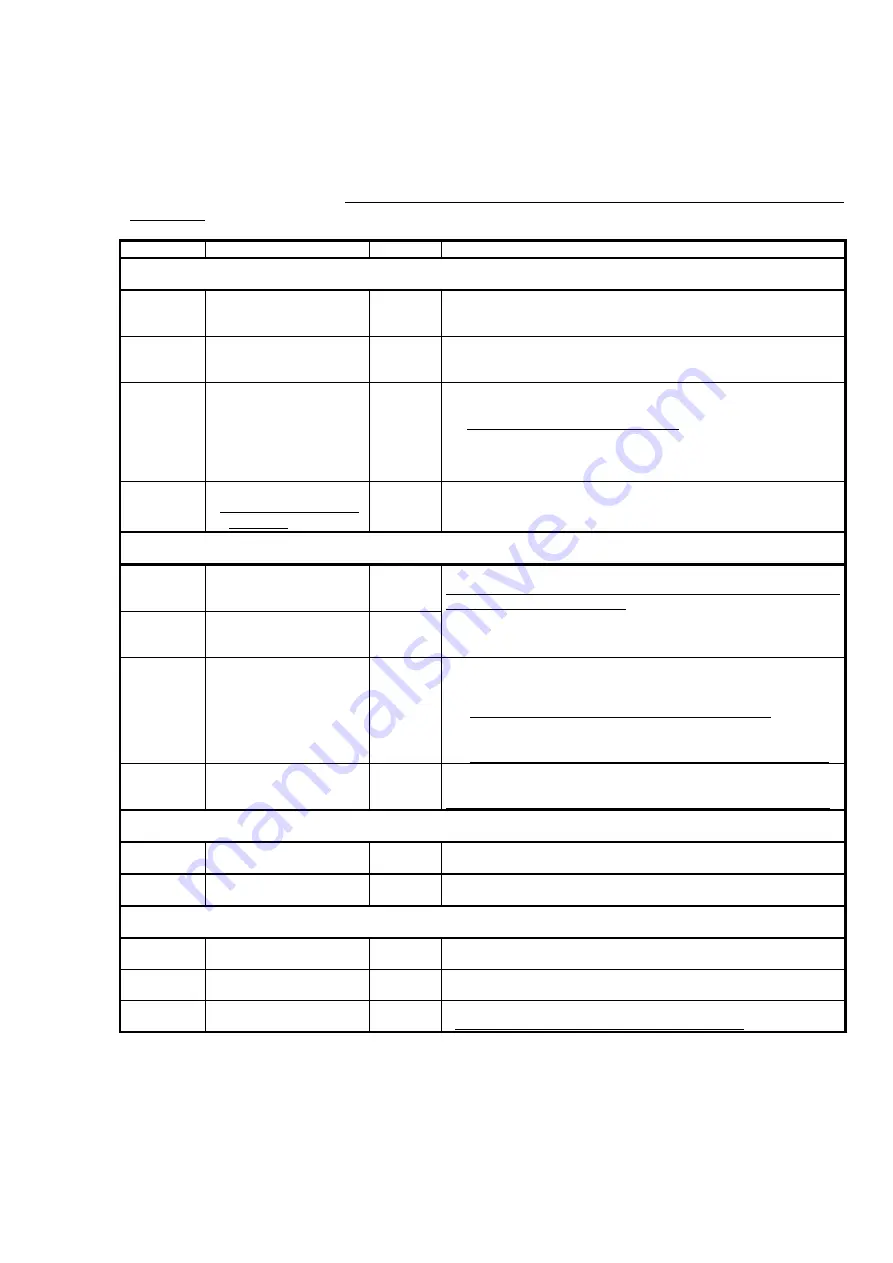
4.2.1 Table of the Parameters You Need to Set Up - Type A
(1)In the Case of Primary Replacement
* Listed below in the table are the parameters you, at least, need to set up when performing a primary replacement.
You may need to set up parameters other than the parameters listed below depending on the setting of the existing
amplifier. For the details, see "Guide for Replacing MR-J2S/J2M Series with J4 Series L(NA)03093", Part 2,
Section 3.5.
Parameter No.
Setting Item
Setting
Description
*Required
PA04
Function selection A-1
0000h
Selection of forced stop/deceleration function
To make the same setting as MR-J2S, select "Forced stop/deceleration function not valid
(EM1 is used)."
PC22
Function selection C-1
□1□□h
Selection of serial encoder
This is a setting for communications with the encoder of MR-J2S. If you do not make a
correct setting, the encoder causes an initial communication data error 1 (AL 16.1).
PA09
Automatic tuning response
8
Automatic tuning response setting
After replacement, set "8" to this setting. Turn on the system.
* After replacement, you need to readjust the gain. This setting is equivalent to the low
response of MR-J2S. The low response may make the gain too low. Make adjustment.
For the details of how to adjust gains, see Section 6 in "Model MR-J4-_A(-RJ) SERVO
AMPLIFIER INSTRUCTION MANUAL" issued by Mitsubishi Electric Corporation.
PD27
Output device selection 2
* For 11kW or higher only when this
function is used
0006h
Selection of dynamic brake interlock (DB)
If you use this function with MR-J2S of 11kW or higher, set up this parameter. DB
signals are assigned to the CN1-48 pins.
*For position control mode only
PA06
Electronic gear numerator (CMX)
(Numerator of the increment of the
command input pulse)
8
(Note 1)
PA07
Electronic gear denominator (CDV)
(Denominator of the increment of
the command input pulse)
1
(Note 1)
If you use an electronic gear, you need to change the setting.
If you perform a primary replacement, specify the same numbers as those of parameter Nos.
3 and 4 of the MR-J2S-_A servo amplifier.
PA13
Input form of command pulse
□2□□h
Selection of pulse row filter
The setting shown in the left-side column is a filter setting of the command pulse row that
is equivalent to that with MR-J2S-_A (when the differential line driver type is set).
*Make sure to set up the filter. Otherwise, positioning may be incorrect.
In addition, you need to make the logic of the command pulse correspond to the positioning
module. For the details, see section 2.6.5.
*If you do not set up the logic, the motor will not turn. Make sure to make the setting.
PA10
In-position range
100
(Note 2)
In-position range
Set up the in-position range in the unit of a command pulse.
Specify the same number as that of parameter No. 5 of the MR-J2S-_A servo amplifier.
*For speed control mode only
PA01
Control mode
□□□2h
Select the control mode of the servo amplifier.
The speed control mode is set.
PC12
Maximum rotational speed of analog
speed command
3000
(Note 3)
Maximum rotational speed of analog speed command
*For torque control mode only
PA01
Control mode
□□□4h
Select the control mode of the servo amplifier.
The torque control mode is set.
PC12
Maximum rotational speed of analog
speed limit
3000
(Note 3)
Maximum rotational speed of analog speed limit
PC13
Maximum output of analog torque
command
100
Maximum output of analog torque command
Specify the same number as that of the MR-J2S-_A servo amplifier.
Note 1 This is an example of the case where the electronic gear of the existing servo amplifier is set to "8/1".
Note 2 This is an example of the case where the in-position range of the existing servo amplifier is set to "100".
Note 3 This is an example of the case where the setting of the existing servo amplifier is "3000".
4 - 3
Summary of Contents for MR-J2S CP-S084 Series
Page 9: ...A 8 MEMO A 8 ...







































































