





























7
Operating modes
200
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
If the mode of operation is taken up, transfer of position data to the drive can begin. As is logical, the
higher-order controller first reads the current actual position out of the controller and writes it cyclically
into the motor controller as a new setpoint value (interpolation_data_record). Acceptance of data by
the motor controller is activated via handshake bits of the controlword and statusword. By setting the
bit enable_ip_mode in the controlword, the host shows that evaluation of the position data should
begin. The data records are evaluated only when the motor controller acknowledges this via the status
bit ip_mode_selected in the statusword.
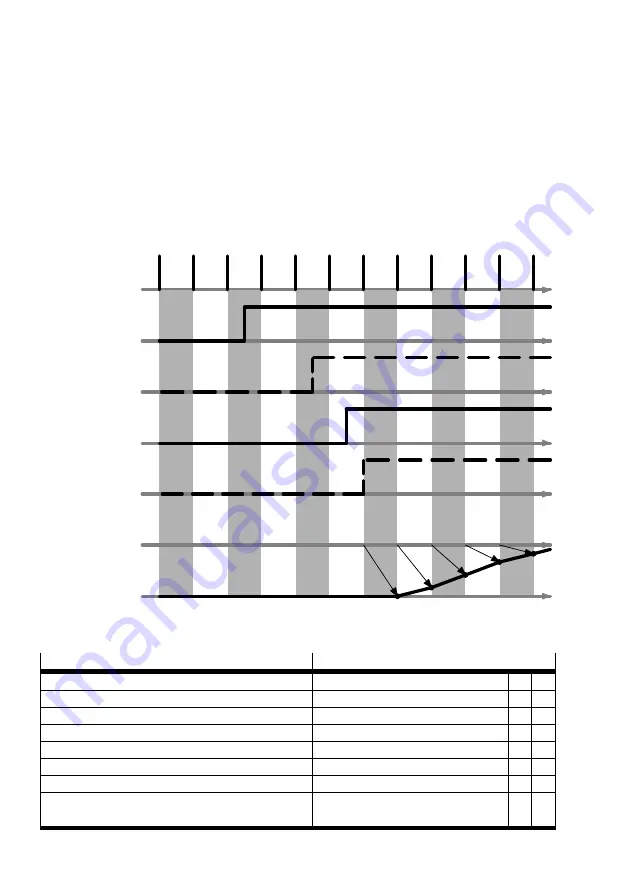
In detail, therefore, the following assignment and procedure result:
modes_of_operation_display = 7
modes_of_operation = 7
controlword bit 4: enable_ip_mode
controlword bit 12: ip_mode_active
SYNC
Item
1
1
1
1
2
3
4
5
1
…
5
: Position specifications
Fig. 7.8
Synchronisation and data release
Event
CAN Object
Generate SYNC message
Request of the ip operating mode:
6060
h
, modes_of_operation
=
07
Wait until operating mode is taken
6061
h
, modes_of_operation_display
=
07
Reading out the current actual position
6064
h
, position_actual_value
Writing back as current setpoint position
60C1
h
_01
h
, ip_data_position
Start of interpolation
6040
h
, controlword, enable_ip_mode
Acknowledgement by motor controller
6041
h
, statusword, ip_mode_active
Changing the current setpoint position in
accordance with trajectory
60C1
h
_01
h
, ip_data_position





















































