





























6
Device Control
152
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
The status diagram can be roughly divided into three areas: “Power Disabled” means that the output
stage is switched off and “Power Enabled” that the output stage is switched on. The statuses needed
for error handling are summarised in the “Fault” area.
The most important statuses of the motor controller are shown highlighted in the diagram. After it is
switched on, the motor controller initialises itself and then reaches the status SWITCH_ON_DISABLED.
In this status, the CAN communication is fully operational and the motor controller can be parametrised
(e.g. the “speed adjustment” operating mode can be set). The output stage is switched off and the
shaft is thus freely rotatable. Through the status transitions
2
,
3
,
4
– which corresponds in principle
to CAN controller enable – the status OPERATION_ENABLE is reached. In this status, the output stage is
switched on and the motor is controlled in accordance with the set operating mode. Always make sure
beforehand that the drive is correctly parametrised and a corresponding setpoint value is equal to zero.
The status transition
9
corresponds to removal of enable, i.e. a motor that is still running would run
out uncontrolled.
If an error occurs (regardless from which status), the system ultimately branches into the FAULT status.
Depending on the severity of the error, certain actions, such as emergency braking, can still be per
formed before (FAULT_REACTION_ACTIVE).
In order to perform the named status transitions, certain bit combinations must be set in the control
word (see below). The lower 4 bits of the controlword are jointly evaluated in order to trigger a status
transition.
In the following, only the most important status transitions
2
,
3
,
4
,
9
and
aE
are explained at first.
A table of all possible statuses and status transitions are found at the end of this chapter.
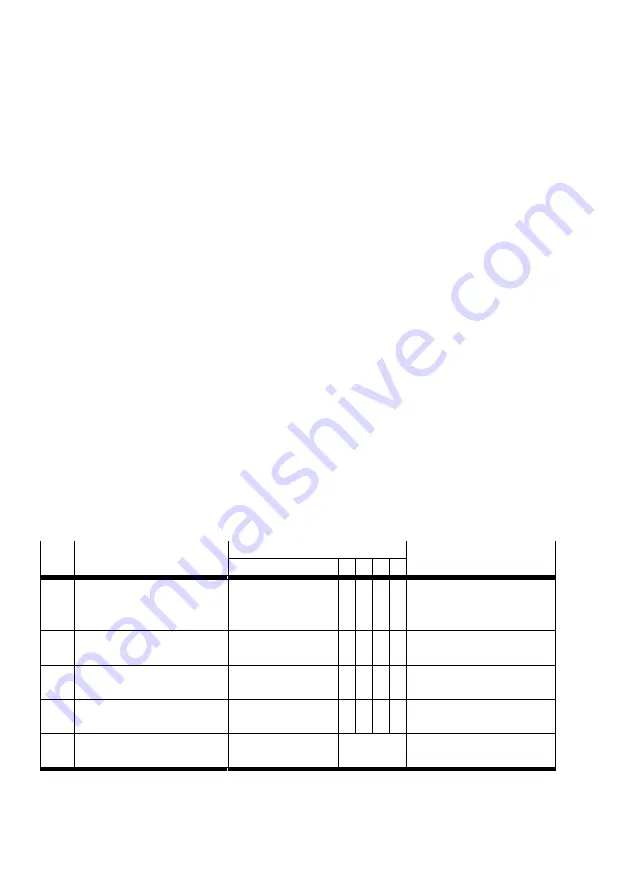
The following table contains the desired status transition in the 1st column and in the 2nd column the
requirements necessary for it (usually a command through the host, here depicted with frame). How
this command is generated, i.e. which bits in the controlword must be set, is visible in the 3rd column (x
= not relevant).
No.
Is performed when
Bit combination (controlword)
Action
Bit
3 2 1 0
2
Output stage and controller
enable prev. + command
Shutdown
Shutdown =
x
1 1 0 None
3
Command Switch On
Switch On =
x
1 1 1
Switching on the output
stage
4
Command Enable Operation
Enable Operation =
1 1 1 1
Control in accordance with
set operating mode
9
Command Disable Voltage
Disable Voltage =
x
x
0 x
Output stage is blocked.
Motor rotates freely.
aE
Error elim Fault
Reset command
Fault Reset =
Bit 7 =
0
1
Acknowledge Error
Tab. 6.2
Most important status transitions of the motor controller





















































