



























Characteristic
Description
Pull up resistors for open
collector driver
●
2k2 on-board on NY4120 and NY4140
●
Not included on NY4125
If necessary add externally
Miscellaneous items
Markers can be set at every increment
Tab. 13-26:
Encoder inputs characteristics per drive module
Encoder inputs assignment
Backplane pin
Description
Dig5VIn0c– and Di
ES– and ES+ for axis0 (NY4120, NY4140)
Dig5Vin1c– and Di
ES– and ES+ for axis1 (NY4120)
Enc#QuadB– and Enc#QuadB+ ES– and ES+ for axis# (NY4125 , # = 0, 1, 2, 3, 4)
EncGND
GND
Tab. 13-27:
Encoder inputs assignment
[See Note 1]
SN65HVD485
120
W
680 pF
DGND
330 pF
330 pF
A
B
EncGND
D
[See Note 3]
MAX1562
ON
Enc5V
[See Note 2]
+5V25
Dig5VIn -
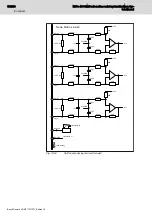
NY4120 / NY4140
+5V25
Node
200
W
Enc
+
-
MAX1564
ON
Enc5V
EncGND
Enc
200
W
[See Note 3]
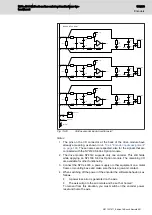
NY4125
100pF
+ 5V25
DGND
Node
SN65HVD485
A
B
[See Note 2]
[See Note 1]
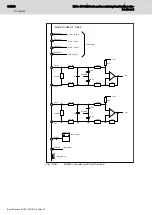
Fig. 13-20:
Input circuit for the Sanyo Denki absolute encoder
Notes
1. Connect the NYCe 4000, a power supply or other equipment on a metal
frame or mounting base and make sure there is a galvanic contact.
2. When switching off the power of the encoder the software behavior is as
follows.
●
A power loss error is generated on the axis.
●
The axis will go to the error state and be set 'not homed'.
To recover from this situation, you must switch on the encoder power,
reset and home the axis.
3. EncGND is connected to the internal system ground, which is ground
MCU, drive logic, analog I/O, and host PC if the MCU is NY4110 and an
IEEE 1394b cable is used.
For proper use, this ground may not be connected to motor or digital I/O
ground.
184/233
Encoders
NYCe 4000 Multi-axis motion control system Hardware Sys‐
tem Manual
Bosch Rexroth AG R911337671_Edition 18







































































