





























AnGND
12 k
W
100 k
W
120
W
1 nF
100 pf
100 pF
V
IN
+
V
IN
-
[See Note 1 and 2]
[See Note 4]
Application
Node
[See Note 3]
AnInC
AnIn
+
AnIn
-
INA121
12 k
W
100 k
W
Differential output
Single-ended output
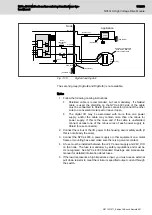
Fig. 11-5:
Analog input circuit for AnIn0
Notes
1. The shielding does not have to be separate for each input as the
drawing suggests but may be common for all analog signals in the
cable.
2. Follow the following cabling instructions:
●
Always use a shielded cable.
●
The shielding on the NYCe 4000 side of the cable must be
connected to Shield (house connector).
●
If the equipment on the application side is metal, connect the shield
to the equipment housing.
3. Connect the NYCe 4000, a power supply or other equipment on a metal
frame or mounting base and make sure there is a galvanic contact.
4. AnGND is connected to the internal system ground: ground MCU, drive
logic, encoder ground, and host PC if the MCU is NY4110 and an
IEEE 1394b cable is used.
5. For proper use, this ground may not be connected to motor or digital I/O
ground.
The choice between the voltage or current measurement of the analog inputs
is user selectable by a software parameter, see the file "nhiparameters.h",
parameter NHI_PAR_ANINx_ADC_DIMENSION_SLOTy (x=0,1 y=0…4) and
the
NYCe
4000
Software
Reference
Manual,
enumeration
nhi_adc_dimension.
●
+ / – 10 Volt differential
If the analog input source provides a balanced differential signal,
connect the signal wires to the corresponding input pins on the
NYCe 4000 side.
●
+ / – 10 Volt single ended
If the analog input source provides a single ended signal, connect the
signal wire to the positive input pin on the NYCe 4000 side, and connect
the application ground to the negative input pin on the NYCe 4000 side.
●
4 – 20 mA.
NYCe 4000 Multi-axis motion control system Hardware Sys‐
tem Manual
131/233
NY4140: High Voltage Drive Module
R911337671_Edition 18 Bosch Rexroth AG







































































