





























4.5 The Visual SafeMove browser
About the Visual SafeMove browser
When adding a safety function from the
Visual SafeMove
tab or the
Modify
tab, it
is automatically displayed in the
Visual SafeMove
browser. These functions and
settings are described in the corresponding section where they are added.
In addition to that, the
Visual SafeMove
browser also has some system related
settings that are described in this section.
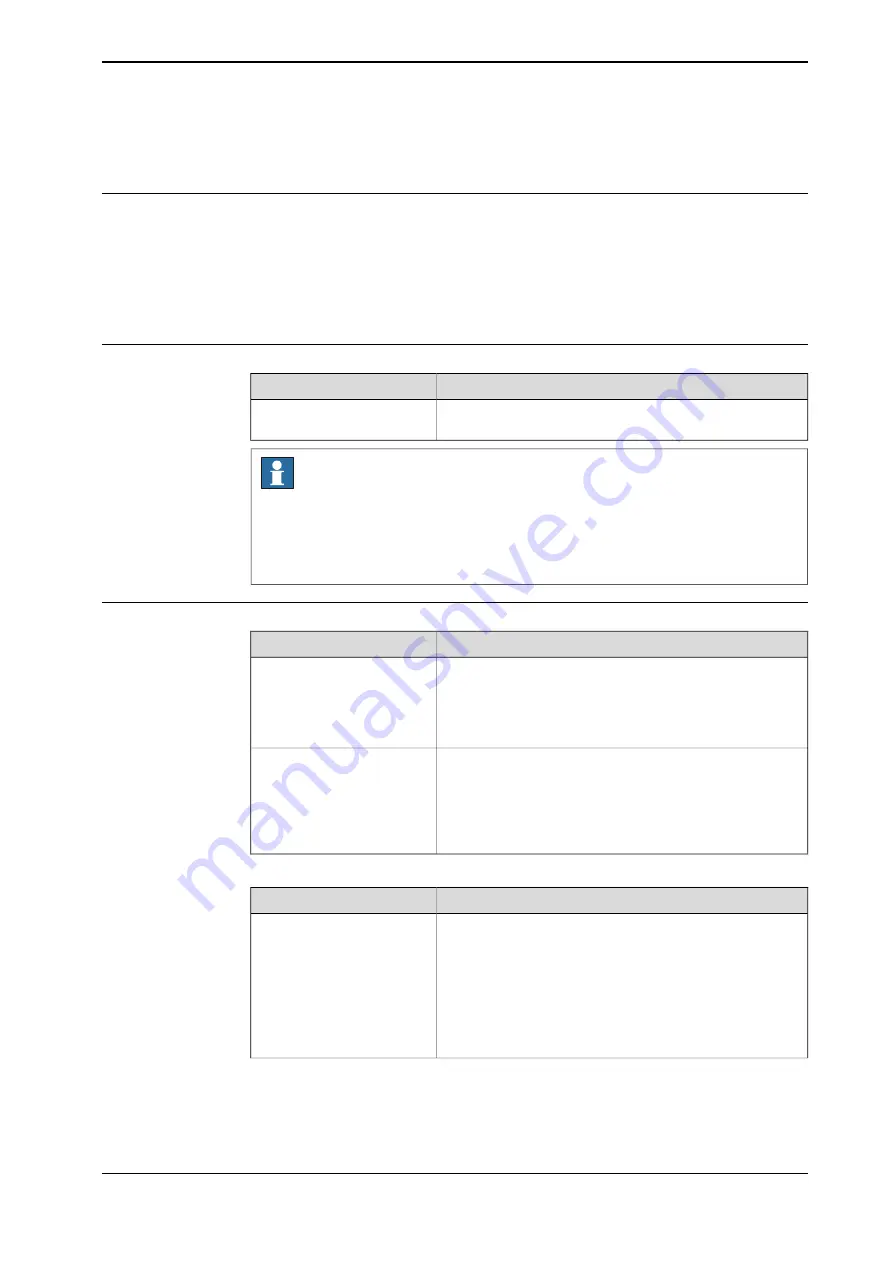
Robot properties node
Description
Setting
The max speed cannot be higher than the default value of
250 mm/s, but a lower value can be set.
Max speed in manual mode
Note
If reducing the max speed that SafeMove allows in manual mode, the jogging
speed of the robot has to be reduced to the same value. Change the parameter
Teach Mode Max Speed
, topic
Motion
and type
Motion Planner
. See
Technical
reference manual - System parameters
.
Robot parameters node
Description
Setting
If any extra equipment is attached to the upper arm, a point
on this equipment can be defined as a check point. The robot
will then monitor the speed of this point so that it does not
exceed 250 mm/s in manual reduced speed mode.
Elbow offset
•
Position X, Y, Z
See
Explanation of Elbow offset on page 88
.
A speed offset for the Safe Brake Ramp function.
Safe Brake Ramp Data
•
Start Speed Offset
For track motions and other additional axes, the parameters
Brake Ramp Limit
and
Ramp Delay
have to be set. The
parameter
Start Speed Offset
is used for both manipulator
and all additional axes, see
Explanation of Safe Brake Ramp
The following settings are available when right-clicking the robot parameters node:
Description
Setting
Set Basic joint supervision mode for the robot.
Basic joint supervision mode
This setting is used with some combinations of robots and
external axes that are normally not supported by SafeMove,
such as robots mounted on a gantry or other non-track ex-
ternal axes.
In Basic joint supervision mode, no safe zones or tool super-
vision functions are allowed.
See
Overview of SafeMove functions on page 35
.
Continues on next page
Application manual - Functional safety and SafeMove2
87
3HAC052610-001 Revision: P
© Copyright 2016-2020 ABB. All rights reserved.
4 The Visual SafeMove user interface in RobotStudio
4.5 The
Visual SafeMove
browser
Summary of Contents for SafeMove2
Page 1: ...ROBOTICS Application manual Functional safety and SafeMove2 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 34: ...This page is intentionally left blank ...
Page 56: ...This page is intentionally left blank ...
Page 72: ...This page is intentionally left blank ...
Page 112: ...This page is intentionally left blank ...
Page 194: ...This page is intentionally left blank ...
Page 196: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 237: ......