





























2.5.7 Control Error Supervision
Control Error Supervision
Control Error Supervision is a function that supervises the difference between the
reference value and the measured value of the motor position of each axis. Control
Error Supervision is required to ensure the accuracy in the supervision functions
and the structural category 3 of the safety system, i.e. dual channel supervision.
Functionality
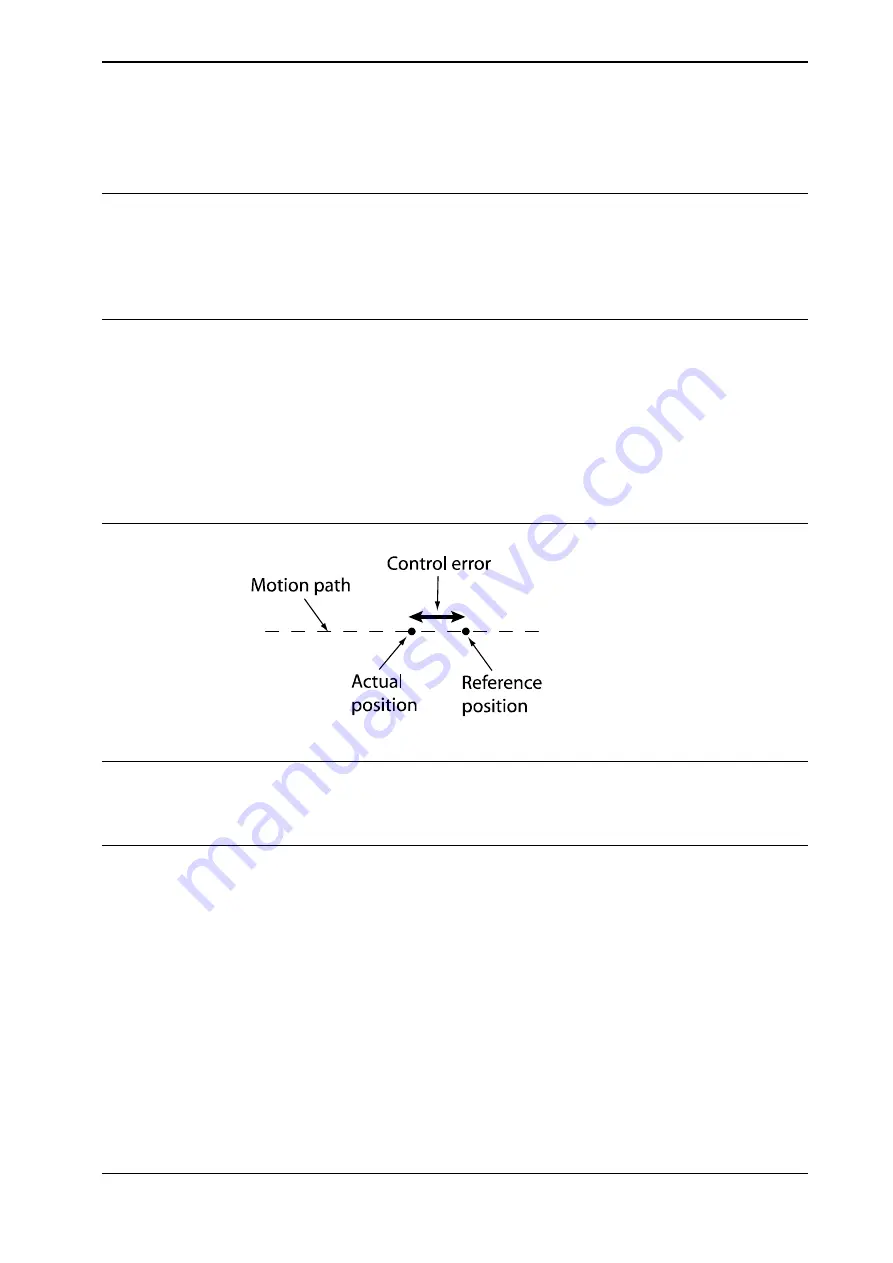
The control error (servo lag) is the absolute value of the difference between the
reference value and the measured value of the motor position of each axis.
Control Error Supervision is activated automatically after the safety controller has
been synchronized with the robot position.
When Control Error Supervision triggers, the following happens:
•
The robot is stopped with a category 1 stop.
•
An event log message (90511) is sent to the robot controller.
Illustration of control error
en0700000723
Function activation
Control Error Supervision is always active. It can only be relaxed by Contact
Application Tolerance.
Dependencies to other functions
If Contact Application Tolerance is active, then Control Error Supervision is relaxed
according to user definitions.
Application manual - Functional safety and SafeMove2
55
3HAC052610-001 Revision: P
© Copyright 2016-2020 ABB. All rights reserved.
2 SafeMove functions
2.5.7 Control Error Supervision
Summary of Contents for SafeMove2
Page 1: ...ROBOTICS Application manual Functional safety and SafeMove2 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 34: ...This page is intentionally left blank ...
Page 56: ...This page is intentionally left blank ...
Page 72: ...This page is intentionally left blank ...
Page 112: ...This page is intentionally left blank ...
Page 194: ...This page is intentionally left blank ...
Page 196: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 237: ......