





























Standard blocks
Block descriptions
ID 441692.01
STÖBER ANTRIEBSTECHNIK
376
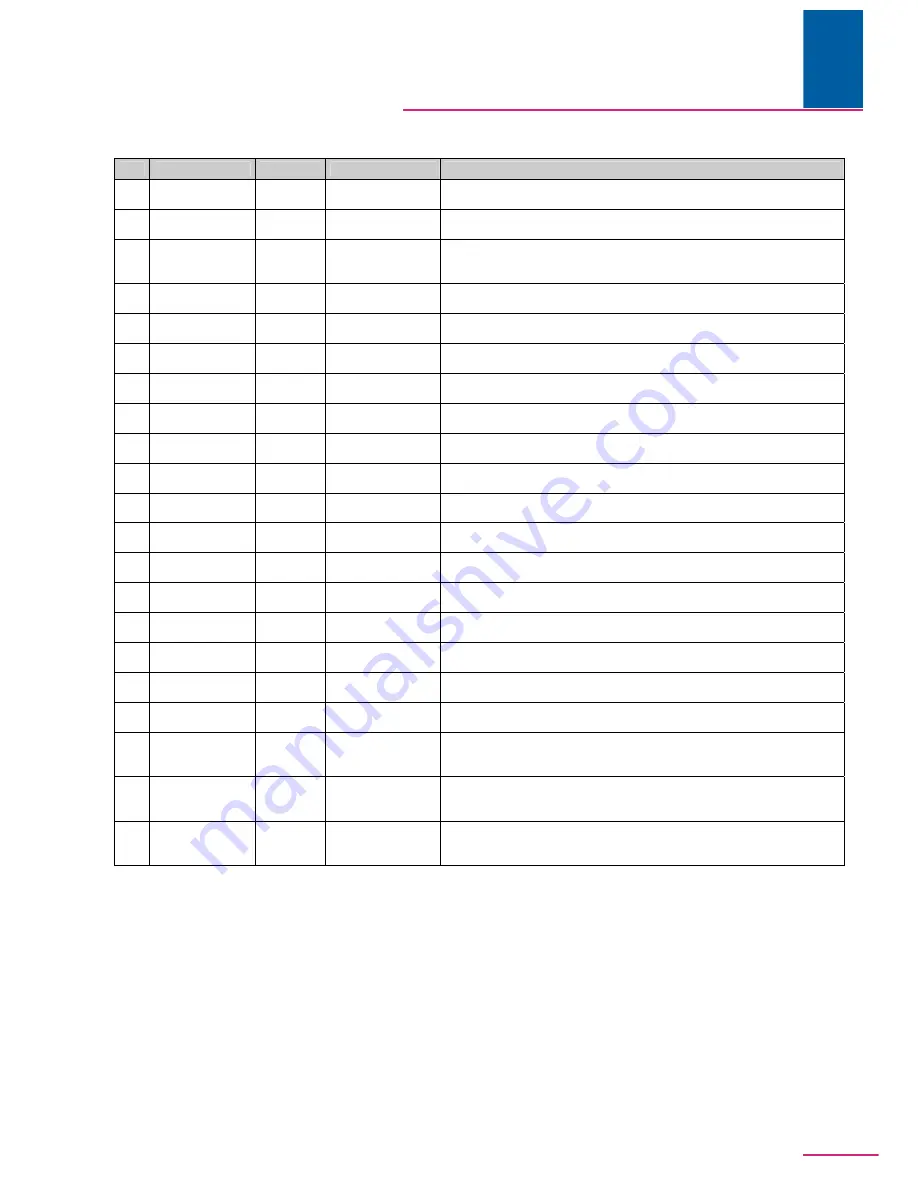
Inputs
No. Name
Datatype Scaling
Description
1
LimitSwi
B –
The signal is used in
I200
, bit 0. Command positioning uses it to show
whether a hardware or software limit switch is active.
2
Denied
B –
The signal is written to
I200
, bit 1. Command positioning uses it to
indicate that a motion job was denied.
3
Limit
B –
The signal is written to
I200
, bit 2. Command positioning uses it to
indicate that the maximum following error has been exceeded or the
maximum torque was reached.
4
Aborted
B –
The signal is written to
I200
, bit 3. Command positioning uses it to
indicate that a motion job was aborted.
5
ConstVel
B –
The signal is written to
I200
, bit 4. Command positioning uses it to
indicate that reference speed was reached.
6
InPositi
B –
The signal is written to
I200
, bit 5. Command positioning uses it to
indicate that the reference position was reached.
7
InRef
B –
The signal is written to
I200
, bit 6. Command positioning uses it to
indicate that the drive is referenced.
8
Local
B –
The signal is written to
I200
, bit 8. Command positioning uses it to
indicate that local mode is active.
9
Cam1
B –
The signal is written to
I200
, bit 9. Command positioning uses it to
indicate the output signal of electrical cam 1.
10
Posi.Swi
B –
The signal is written to
I200
, bit 10. Command positioning uses it to
indicate the output signal of the posi switching point.
11
PLatchB0
B –
The signal is written to
I200
, bit 11. Command positioning uses it to
indicate status bit 0 of the posi latch function.
12
PLatchB1
B –
The signal is written to
I200
, bit 12. Command positioning uses it to
indicate status bit 1 of the posi latch function.
13
MotioID0
B –
The signal is written to
I200
, bit 13. Command positioning uses it to
indicate bit 0 of the MotionID.
14
MotioID1
B –
The signal is written to
I200
, bit 14. Command positioning uses it to
indicate bit 1 of the MotionID.
15
MotioID2
B –
The signal is written to
I200
, bit 15. Command positioning uses it to
indicate bit 2 of the MotionID.
16
PLCoStat
U8 –
The signal is written to
I201
, bits 0 to 3. Command positioning uses
them to indicate the PLCopen state code.
17
Done
B –
The signal is written to
I201
, bit 4. Command positioning uses it to
indicate that a motion job is finished.
18
InPosWin
B –
The signal is written to
I201
, bit 5. Command positioning uses it to
indicate that the drive is within the position window.
19
Accel
B –
The signal is written to
I201
, bit 6. Command positioning uses it to
indicate that the profile generator specifies an accelerating sequence
of motion.
20
Decel
B –
The signal is written to
I201
, bit 7. Command positioning uses it to
indicate that the profile generator specifies a decelerating sequence
of motion.
21
Act.Pos.
P64 Skal.-Fkt.
8
The signal is converted to data format I32 and then written to
I203
current (actual) position. Command positioning uses it to indicate the
actual position.
Summary of Contents for POSIDRIVE MDS 5000
Page 1: ...from V 5 6 D 02 2012 DE DESCRIPTION 5th generation of STÖBER inverters Blocks ...
Page 12: ...Organization blocks Block descriptions ID 441692 01 www stoeber de 11 STÖBER ANTRIEBSTECHNIK ...
Page 22: ...System blocks Block descriptions ID 441692 01 www stoeber de 21 STÖBER ANTRIEBSTECHNIK ...
Page 322: ...Standard blocks Block descriptions ID 441692 01 www stoeber de 321 STÖBER ANTRIEBSTECHNIK ...
Page 588: ...Notes Block descriptions ID 441692 01 www stoeber de STÖBER ANTRIEBSTECHNIK ...







































































