





























SINUS PENTA
PROGRAMMING GUIDE
410
/
486
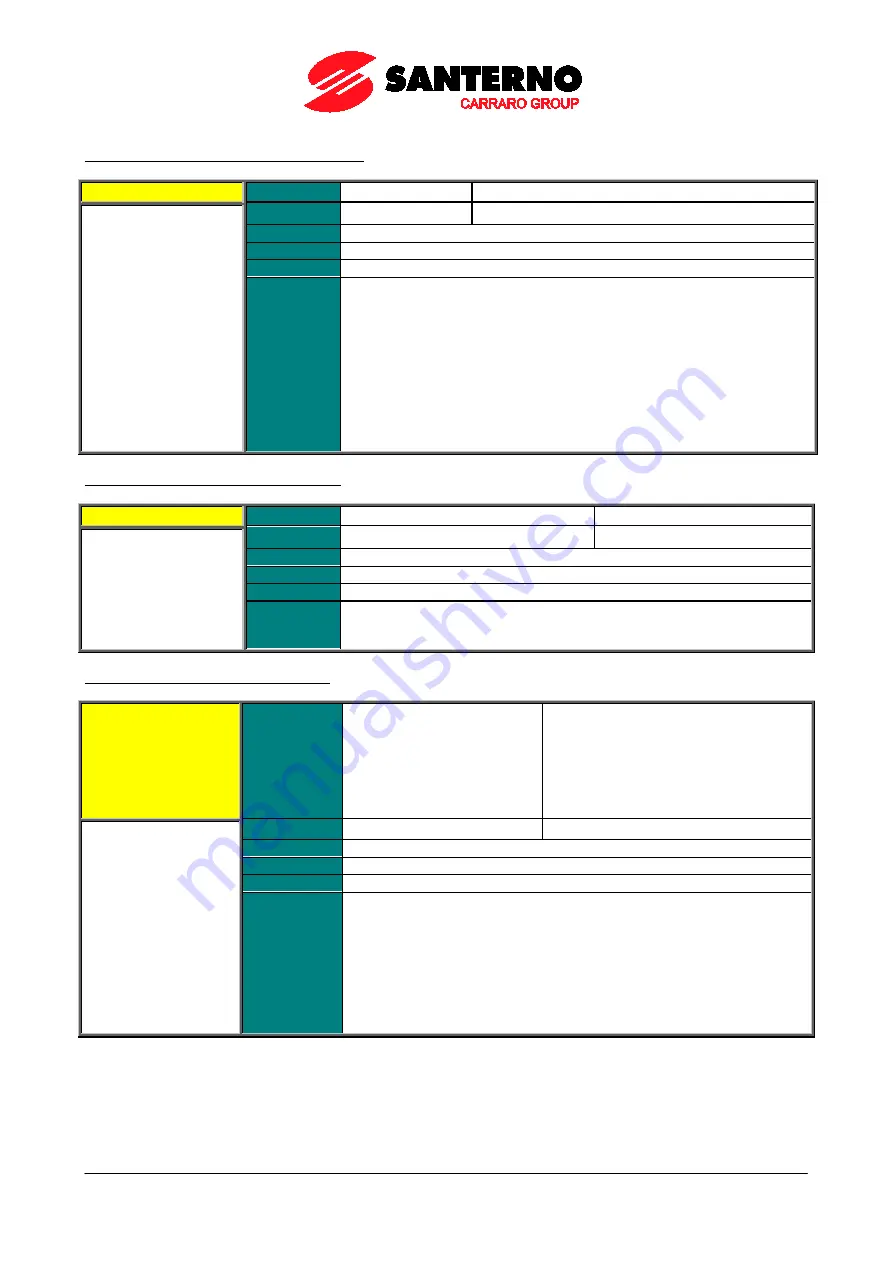
C300/C300a Pretensioning Torque [%Cmot]
C300/C300a
Range
-5000
÷
+5000
-500.0%
÷
+500.0%
Default
0
0.0 %
Level
ENGINEERING
Address
1300/1308
Control
VTC and FOC
Function
If not set to zero, this parameter defines the torque value (expressed as a
percentage of the rated torque of the selected motor) reached before the
speed ramp starts after sending a
START
command.
After sending a
START
command, the drive brings the motor torque to the
level set in
C300/C300a
and torque is adjusted by the speed loop for the time
set in
C301/C301a
in order to keep the motor standstill. Once this time has
elapsed, the speed ramp can start and the motor follows the required speed
profile.
The torque sign defines the running direction.
The sign of the speed reference determines which value percent is to be
used;
C300
is for the positive sign,
C300a
is for the negative sign.
C301/C301a Pretensioning Torque Time
C301/C301a
Range
0
÷
32000
0
÷
32000 ms
Default
0
0
Level
ENGINEERING
Address
1301/1309
Control
VTC and FOC
Function
Delay time passing between the start command and the speed ramp start.
During this time, the motor torque output is set in
C300/C300a
to keep the
load suspended.
C302 Closed Brake Input (NO contact)
C302
Range
0
÷
12
0
÷
20 if ES847 or ES870 is
installed
0
→
Inactive
1
÷
8
→
MDI1
÷
MDI8
9
÷
12
→
MPL1
÷
MPL4
13
÷
16
→
TFL1
÷
TFL4
17
÷
24
→
XMDI1
÷
XMDI8
Default
0
0
→
Inactive
Level
ENGINEERING
Address
1302
Control
VTC and FOC
Function
This parameter determines the digital input assigned to the mechanical
brake closure feedback (NO contact, which closes only when the brake is
engaged). When the brake closure is detected after a deceleration ramp,
the current required for motor fluxing is injected into the motor. If no digital
input is available for the detection of the brake closure, set max. time in
C183
, in order to avoid injecting current into the motor after the deceleration
ramp. When the motor is not running, the
START
command is disabled and
the speed setpoint is at zero for a time longer than the one set in
C183
, the
drive will be put on standby.





















































