




























2.1 Connections with External Equipment
2-2
Name of equipment
Description
Teach Pendant
This HMI unit enables the operator to run the robot, create the robot programs and
perform the parameter setting operations. It displays the robot program data,
operation statuses of the robot, etc. In addition, it displays the initial settings
established for the robot safety units and the errors which have occurred in these
units.
It is provided with emergency stop switch signals and enable switch signals which
are safety-related signals (hereafter, the “safety signals”), and these signals are
connected to the RMU.
External Control
System or Process
Control Panel
This external control system or process control panel on the production line is
connected to the robot controller through the input/output signals and
communication line in order to control the robot operations. It connects the
emergency stop, safety stop and other input/output signals to the RMU.
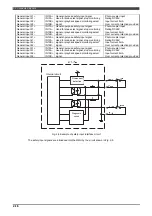
Robot Controller
The robot controller controls the operation panel, motion controller, servo amplifier,
magnet switch and robot which houses the RMU, all of which are described below.
The signal lines of the teach pendant and process control panel described above
are connected to the robot controller.
Operation Panel
This panel is used by the operators to perform the robot operations, and the
emergency stop switch signals relating to the motor control sequence connected
to the monitoring unit as the safety signals.
Motion Controller
This unit determines how the robot operates. It is used to prepare the robot
programs, set and store the parameters, create the robot operation commands in
accordance with the robot program, and send the commands to the servo amplifier
to run the motor. In order to perform speed and position monitoring, it is used to set
and check the parameters required with the monitoring unit, transfer the
information to/from the RMU with the respective communications, and output the
information to the teach pendant and other equipment..
Robot Monitoring Unit
(RMU)
The RMU shuts off the drive power of the robot when trouble is deemed to have
occurred as a result of monitoring the input/output signals, robot motors and the
position information from the encoder. These signals and information are
monitored separately by two microcomputers, the information of one
microcomputer is checked against the information of the other, and when different
results are obtained, the unit also shuts off the drive power.
Drive Power
This power supply is used to drive the robot.
Magnet Switch
This switch enables the power supplied to the robot to be turned on or off, and it is
controlled by the redundant safety output supplied from the RMU.
Drive Unit
The servo amplifiers are used to drive the robot motors. The axis motors are driven
on the basis of the operation commands from the motion controller. The drive
power of the servo amplifiers is cut off by the magnet switch to stop the robot.
Robot
The robot is monitored by the RMU. TCP and joint positions and speeds are
monitored, and when trouble occurs, the robot power can be shut off by the
magnet switch to stop the robot.
Limit switches which restrict the operating ranges are mounted for the joints, and
their signals are used as safety inputs and connected to the RMU. If a movement
beyond an operating range or other abnormal operation has occurred, the drive
power can be shut off.
Motor
Encoder
Encoders are installed for the robot axes, the position data of the robot joints is
sent to the servo amplifiers and, based on this data, the servo amplifiers provide
the appropriate motor drive current. The monitoring unit monitors the position and
speed after receiving this position data.
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......


































































