





























2.3 Connected signals
2-14
2.3 Connected signals
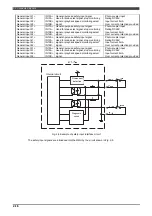
The signals connected to the RMU are described hereinafter.
2.3.1 Signal connection diagram
Fig. 2-4 Connections of input/output signals
XSF1+,XSF1-
XSF2+,XSF2-
,R_EMG1-
,R_EMG2-
DSW1+,DSW1-
DSW2+,DSW2-
イネーブルスイッチ1
イネーブルスイッチ2
T_MODE
P_OFF
LS1+,LS1-
ロボット端LS1
LS2+,LS2-
COM
LS_RLS
COM(24V)
LS解除SW
ロボット端LS2
電源
power
ロボット制御装置 Robot controller
ロボット非常停止1
ロボット非常停止2
,X_EMG2-
,X_EMG1-
M_MODE
動力遮断指示
Robot power-ON1
Robot power-ON
Back-check
I
/
O
基
板
ドライブユニット
ロボット動力供給1
ロボット動力供給
バックチェック
Drive Unit
MCX1+
MCX1-
BKC1+
BKC1-
CNGP4
CN1
再生条件
Auto
,GPO_1A-
,GPO_1B-
GPIN1
GPIN2
GPIN3
GPIN4
GPIN5
GPIN6
COM
LS release SW
Robot emergency stop1
Robot emergency stop2
Enable switch1
Enable switch2
教示条件
Robot
Teach pendant
SYS
システム正常
Power shutoff instruction
Teach
System OK
操作パネル
operation panel
モードSW
mode-sw
SD1±,SD2±
SD3±,SD4±
SD5±,SD6±
SD7±,SD8±
CNE1
CNE2
U1,V1,W1,LOW1
U2,V2,W2,LOW2
U3,V3,W3,LOW3
U4,V4,W4,LOW4
CNROT
Robot power-ON2
ロボット動力供給2
MCX21
MCX22
エンコーダ通信(1-8軸)
エンコーダ通信(1-8軸)
Encoder I/F(1-8axis)
Encoder I/F(1-8axis)
磁極位置(1-8軸)
MagneticPolePosition
(1-8axis)
Robot LS1
Robot LS2
,GPO1_BC-
D+,D-
CNCOM
CPU
サーボ通信
Servo communication
U24V,U0V
U24V(24V),U0V(GND)
SLV1+,SLV1-
スレーブ異常1
Slave error1
SLV2+,SLV2-
スレーブ異常2
Slave error2
RDY_ON
運転準備入ランプ
Standby-ON-Lamp
SD1±,SD2±
SD3±,SD4±
SD5±,SD6±
SD7±,SD8±
,GPO_2A-
,GPO_2B-
,GPO2_BC-
,GPO_3A-
,GPO_3B-
,GPO3_BC-
N.C.
XRDY_ON
COM(24V)
COM
,GPI_1A-
,GPI_1B-
CNGP1
,GPI_2A-
,GPI_2B-
,GPI_3A-
,GPI_3B-
,GPI_4A-
,GPI_4B-
,GPI_5A-
,GPI_5B-
GPOUT1
GPOUT2
GPOUT3
GPOUT4
GPOUT5
GPOUT6
GPOUT7
COM
CNGP2
,GPI_6A-
,GPI_6B-
,GPI_7A-
,GPI_7B-
CNGP3
汎用安全入力11
汎用安全入力12
General-purpose safety input11
汎用安全入力21
汎用安全入力22
汎用安全入力31
汎用安全入力32
汎用安全入力41
汎用安全入力42
汎用安全入力51
汎用安全入力52
汎用安全入力61
汎用安全入力62
汎用安全入力71
汎用安全入力72
General-purpose safety input12
General-purpose safety input21
General-purpose safety input22
General-purpose safety input31
General-purpose safety input32
General-purpose safety input41
General-purpose safety input42
General-purpose safety input51
General-purpose safety input52
General-purpose safety input61
General-purpose safety input62
General-purpose safety input71
General-purpose safety input72
COM(24V)
Back-check1
汎用安全出力11
汎用安全出力12
バックチェック1
Back-check2
汎用安全出力21
汎用安全出力22
バックチェック2
Back-check3
汎用安全出力31
汎用安全出力32
バックチェック3
General-purpose safety output11
General-purpose safety output12
General-purpose safety output21
General-purpose safety output22
General-purpose safety output31
General-purpose safety output32
非常停止2
非常停止1
Emergency stop1
Emergency stop2
セーフティプラグ2
セーフティプラグ1
Safety plug1
COM(0V)
Safety plug2
Tool No.1
N.C.
ツール番号1
ツール番号2
ツール番号3
ツール番号4
Tool No.2
Tool No.3
Tool No.4
N.C.
N.C.
N.C.
N.C.
N.C.
N.C.
N.C.
サーボON
TBX-1
周辺機器
External
system
TBX-1
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......




























































