





























2.7 Logical operation output function
2-35
2.7 Logical operation output function
This section describes a function that sets logical operation for general safety output signals and output those
signals.
In this function, safety related information e.g. monitoring results of the motion range, angles, motion speed,
or safety inputs etc. can be output to each 3 general safety output signals.
The general safety output signals output "Output diagnostic pulse" when executing the output operation.
Therefore, safety relays or magnet switches that are equipped with force guide structure should be used for
the respective output circuits.
And, please use the "b contact" also as a feedback signal to detect the malfunction of the safety relays or the
magnet switches.
DANGER
If there is wrong setting in this "Logical operation output function", safety function
cannnot work correctly and the robot may make unexpected motion.
In a case like that, the operator may be hit or pinched by the robot arm and results in
death or serious injury.
Function
It is possible to output the "General safety output signal" making logical operation (AND, OR, NOT) using the
designated safety signals.
For the logical operation setting, up to 3 inputs can be used.
An example of the logical operation
Input1 Input2 Input3
General safety output1 = Inside Part#1 AND NOT Teach mode AND Inside High spd.
The order of the operation: NOT -> AND -> OR -> left side of the operation
Restrictions for the logical operation
(1) The safety outputs will be turned OFF in case of "Emergency stop condition".
("Emergency stop condition" includes cases in which a fault occurs in the all monitoring function except for hte
emergency stop input)
(2) Once an input relay is used in one operation, it cannot be used in other operation again.
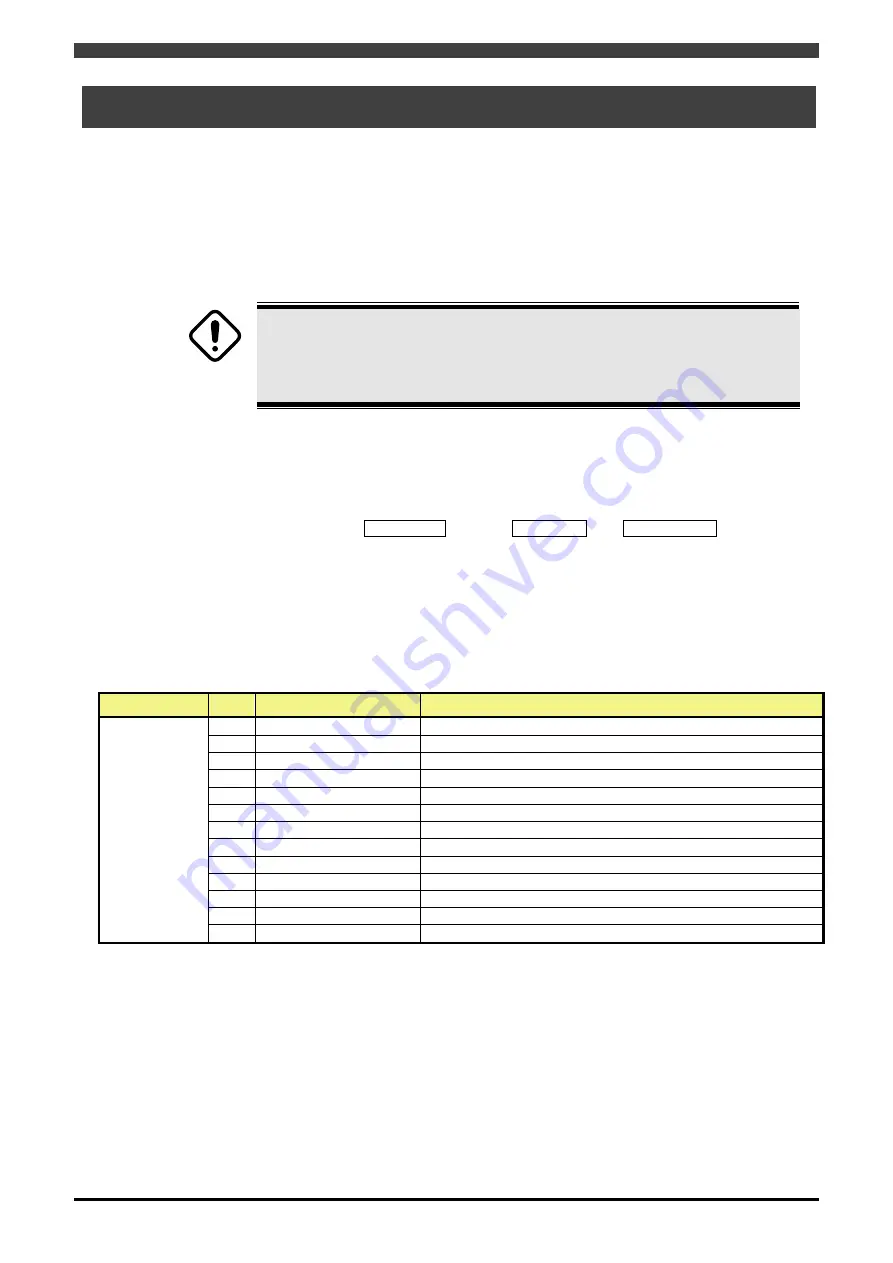
Table 2-21 Logical operation relays
Group
No.
Item
Description
1
Robot Emergency Stop
Turns ON when the "Enable SW" input turns ON.
2
Enable SW
Turns ON when the "Enable SW" input turns ON.
3
Slave error
Turns ON when the "Slave error" input turns ON.
4
Rob.LS detect
Turns ON when the "Robot LS detect" input turns ON.
5
Emergency Stop
Turns ON when the "Emergency stop" input turns ON.
6
Safety plug
Turns ON when the "Safety plug" input turns ON.
7
Protective stop
Turns ON when the "Protective stop" input turns ON.
8
Ext. enable
Turns ON when the "External enable" input turns ON.
9
Safety in.1
Turns ON when the "General safety input 1" turns ON.
10
Safety in.2
Turns ON when the "General safety input 2" turns ON.
11
Safety in.3
Turns ON when the "General safety input 3" turns ON.
12
Safety in.4
Turns ON when the "General safety input 4" turns ON.
Safety in.relay
13
Safety in.5
Turns ON when the "General safety input 5" turns ON.
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......







































































