


























7.2Troubleshooting
7-10
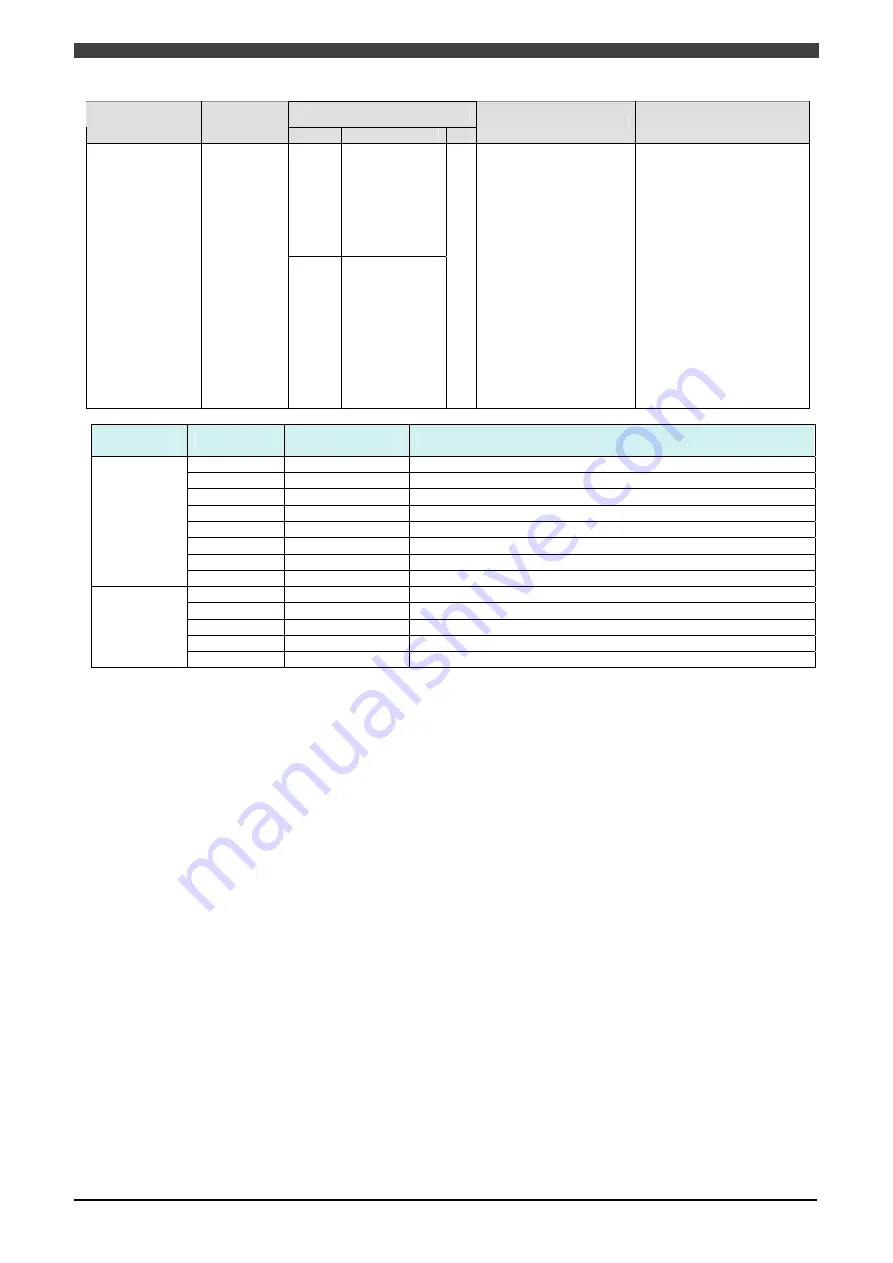
Assist code
Error
Error code
Top: Controller
Bottom: RMU
1
2
3
Description of trouble
Remedy
16
1 Safety input 1
2 Safety input 2
4 Safety input 3
8 Safety input 4
16 Safety input 5
32 Safety input 6
64 Safety input 7
128 Safety input 8
Disparity error
of input signal
E1105
E07
48
1 Safety input 9
2 Safety input 10
4 Safety input 11
8 Safety input 12
16 Safety input 13
-
This error occurs when
the redundant safety
signals which are input
to the RMU have been
detected as different
logic.
If a robot emergency
stop disparity has been
detected, the
emergency stop output
is turned OFF. When
any other disparity has
been detected, the
power supply output is
turned OFF.
After removing the cause
of the error, turn OFF both
of those redundunt
signals, and then press
[Reset] key twice.
Please refer to “2.3.2
safety inputs” table 2-10
for the detail of safety
input signals.
Assist code
SUB1
Assist code
SUB2
Assist code
SUB3
Description
1
Safety input 1
"Robot emergency stop signal" is inconsistent.
2
Safety input 2
"Enable switch signal" is inconsistent.
4
Safety input 3
"Slave error signal" is inconsistent.
8
Safety input 4
"Robot LS detection signal" is inconsistent.
16
Safety input 5
"Emergency stop signal" is inconsistent.
32
Safety input 6
"Safety plug signal" is inconsistent.
64
Safety input 7
"Protective stop signal" is inconsistent.
16
128
Safety input 8
"External enable signal" is inconsistent.
1
Safety input 9
"General input 1 signal" is inconsistent.
2
Safety input 10
"General input 2 signal" is inconsistent.
4
Safety input 11
"General input 3 signal" is inconsistent.
8
Safety input 12
"General input 4 signal" is inconsistent.
32
16
Safety input 13
"General input 5 signal" is inconsistent.
(NOTE) When plural errors happen at the same time in ASSIST CODE SUB1, the ASSIST CODE SUB 2 value will become
the total number of each value.
Summary of Contents for RMU20-20
Page 2: ......
Page 6: ...Contents 4 ...
Page 8: ......
Page 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Page 68: ...2 9 Enabling RMU 2 40 NOTE ...
Page 70: ......
Page 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Page 102: ......
Page 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Page 144: ......
Page 154: ...5 4Trouble shooting 5 10 NOTE ...
Page 156: ......
Page 166: ...6 4Trouble shooting 6 10 NOTE ...
Page 168: ......
Page 189: ......







































































