





























xiv
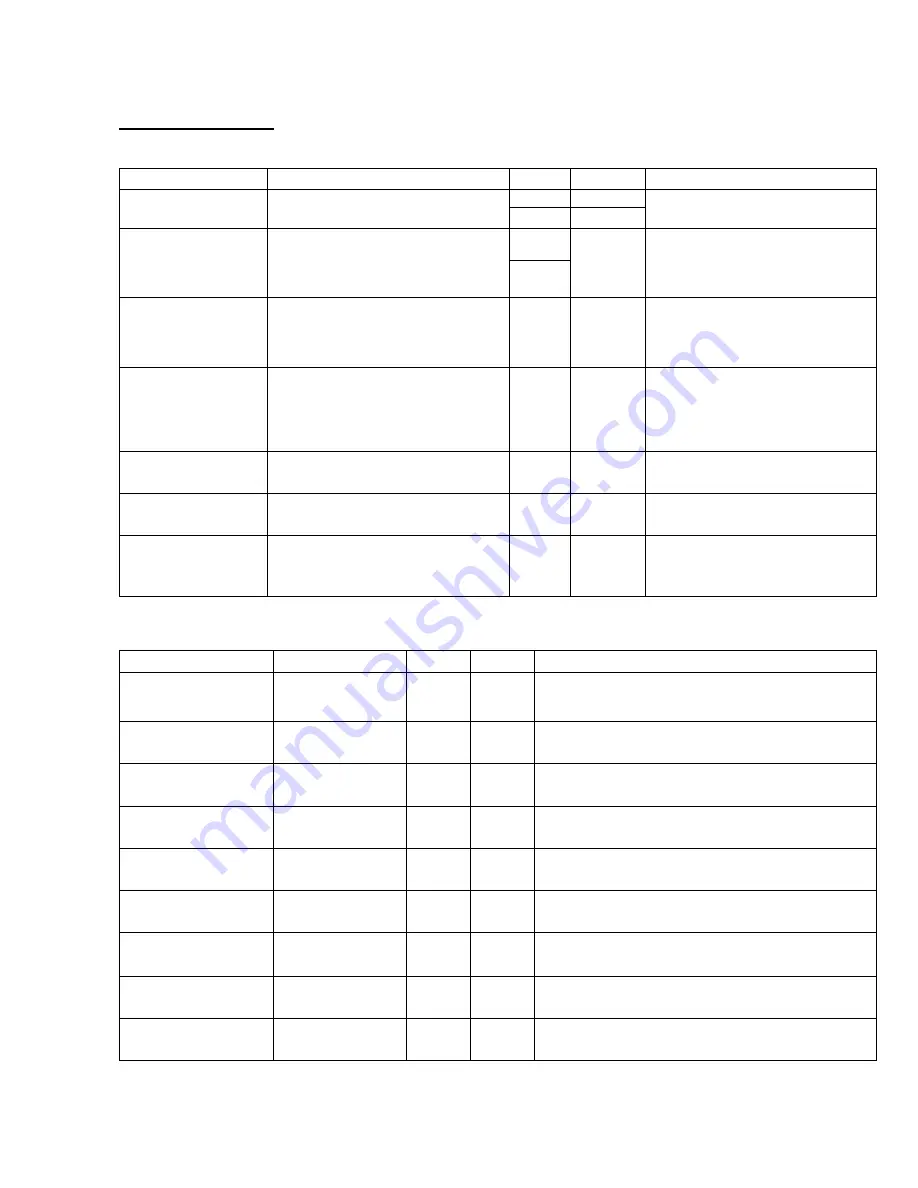
Key Drive Parameters
Drive Menu A1
Parameter
Description
Default
Units
Suggested Adjustment
CONTRACT CAR SPD
Elevator contract speed
400.0
fpm
Adjust to speed the installation is rated
to run at.
0.0
m/s
CONTRACT MTR SPD
Motor speed at elevator contract speed
1130.0
rpm
Adjust this value to ensure the actual
running speed of the car matches the
parameter above - If the car is traveling
too fast then reduce this value, if too
slow then increase it.
0.0
RESPONSE
Sensitivity of the speed regulator
10.0
rad/sec
Set to 20 to improve the drive response
to changes in speed reference. If the
motor current and speed becomes
unstable, reduce however if the value is
too small, the response will be sluggish.
INERTIA
System inertia
2.00
sec
Determines the system inertia in terms
of the time it takes the elevator to
accelerate to contract speed. If the car
is light, the value will be smaller than the
default and vice versa if the car is
heavy.
ENCODER PULSES
Encoder counts per revolution
10000
PPR
Obtain the Encoder PPR from the
encoder nameplate and enter in this
parameter.
SERIAL CNTS/REV
Encoder position counts per revolution
8192
none
Obtain the Encoder serial cnts/rev from
encoder nameplate and enter in this
parameter.
MTR TORQUE LIMIT
Motoring Torque Limit. Units in percent of
rated torque. Note: The Torque Limit LED
will be lit once the limit defined by this
parameter is reached.
200.0
%
Determines the maximum torque
allowed when in the motoring mode.
This is generally left at the default
setting
Table 2 PM: Important parameters in A1 menu to set/check when setting up a drive in PM mode
Power Convert A4
Parameter
Description
Default
Units
Suggested Adjustment
INPUT L-L VOLTS
Nominal line-line AC
input Voltage, RMS
0
Volts
Adjust to match the voltage across R, S, and T of the drive.
The drive uses this value for its undervoltage alarm and fault
detection circuit
UV ALARM LEVEL
Voltage level for
undervoltage alarm
90
%
nominal
dc bus
Set to 80%
UV FAULT LEVEL
Voltage level for
undervoltage fault
80
%
nominal
dc bus
Set to 70 %
PWM FREQUENCY
Carrier frequency
10.0
kHz
It should not be necessary to change this value from 10kHz.
However it can be useful to reduce this frequency to try to
determine if a vibration is electrically induced or otherwise
ID REG DIFF GAIN
Differential gain for
current regulator flux
generation
0.00
None
Enter / verify that it should be set to default.
ID REG PROP GAIN
Proportional gain for
current regulator flux
generation
0.700
None
Enter / verify that it should be set to default.
ID REG INTG GAIN
Integral gain for the
current regulator flux
generation
1.00
None
Enter / verify that it should be set to default.
IQ REG DIFF GAIN
Differential gain for
the current regulation
of motor torque
0.00
None
Enter / verify that it should be set to default.
IQ REG PROP GAIN
Proportional gain for
the current regulator
torque generation
0.700
None
Enter / verify that it should be set to default.







































































