





























327
Part 4 Commands
2. Arm System
2-1 Right/Left Arm Systems
The robot position has two patterns based on the right arm system and the left arm system,
respectively.
Right arm system: Arm 2 is located at a point away in the CCW direction from the position where
arms 1 and 2 form a straight line.
Left arm system: Arm 2 is located at a point away in the CW direction from the position where
arms 1 and 2 form a straight line.
Both terms express a robot arm condition by drawing a parallel to human arms.
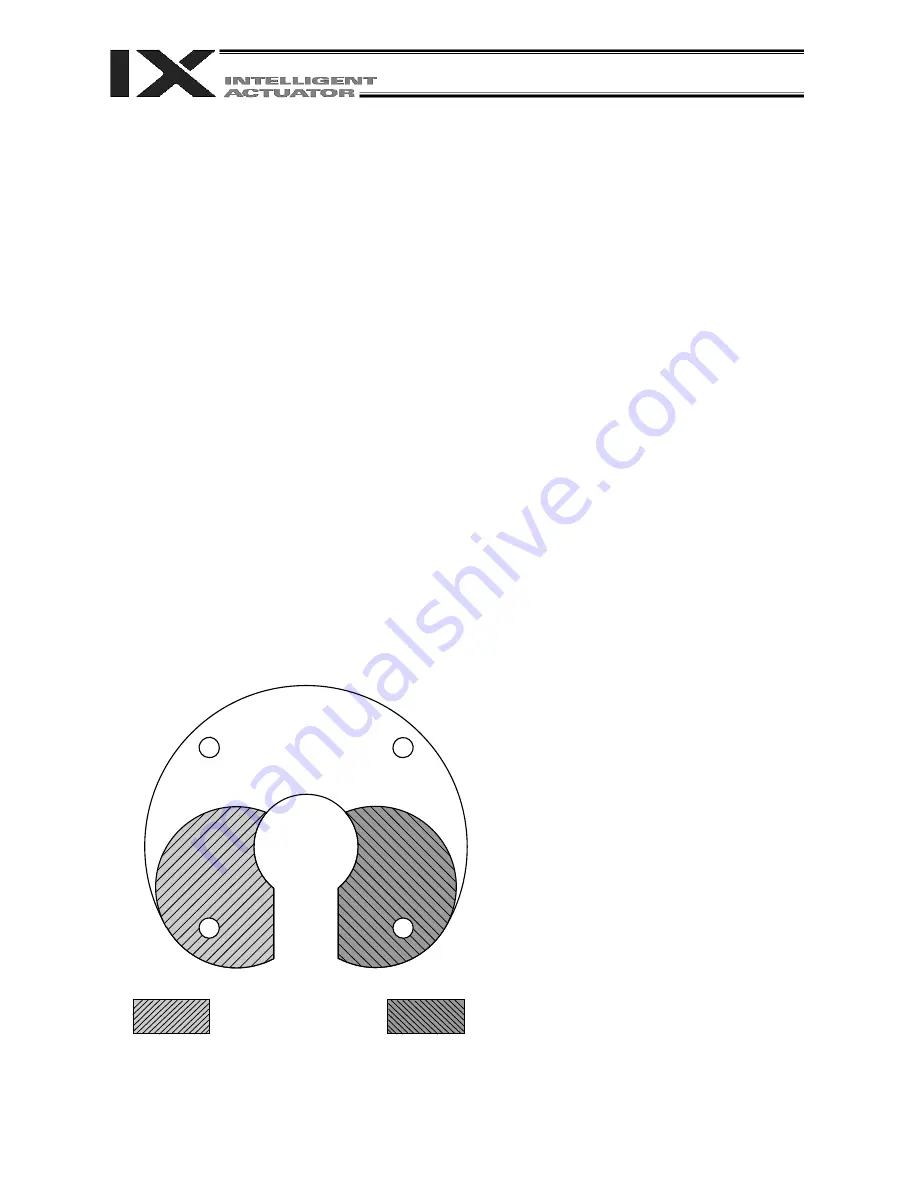
The operation area is different between the right arm system and the left arm system.
The figure below shows the operation area of each arm system on a robot with an arm length of 500
mm:
Operation area of the left arm system
Operation area of the right arm system
Left arm system
Right arm system
328
Part 4 Commands
2-2 Arm-System Control Commands (Dedicated SCARA Command)
The right and left arm systems are defined as the opposite arm systems to the left and right arm
systems, respectively.
The actual arm system that is currently effective is defined as the current arm system.
The arm system to be used for positioning to the target using a movement command is defined as
the target arm system.
The commands used to control the robot's arm system include PTPD, PTPE, PTPR, PTPL, RIGH
and LEFT.
PTPD, PTPE, PTPR and PTPL are control declaration commands for the target arm system in PTP
operation. Therefore, once executed these commands will remain valid while the program is running.
CP operation commands do not accompany change of arm systems during command execution, so
they are not affected by the above commands and the relevant operations will be performed by the
current arm system.
Only one of PTPD, PTPE, PTPR and PTPL, whichever is executed last, will become valid.
RIGH and LEFT are control commands for the current arm system.
2-3 Arm-System Control Commands and Change of Arm Systems
This section explains the arm-system control commands and how the arm system changes in PTP
operation after declaration of each command.
Position Nos. 1 to 4 are set as illustrated below ([1] to [4]).
Movement in the order of 1
2
3
2
1
4 will be attempted using MOVP commands (PTP
operation).
The robot is initially resting at position No. 1.
Position No. 3 exists inside an area accessible only by the left arm system. (Positioning to this point
cannot be performed with the right arm system.)
Position No. 4 exists inside an area accessible only by the right arm system. (Positioning to this
point cannot be performed with the left arm system.)
:
:
:
Arm-system control commands
MOVP 2
MOVP 3
MOVP 2
MOVP 1
MOVP 4
EXIT
How the arm system will change is explained for each arm-system control command.
1
2
3
4
: Area accessibly only
by the right arm system
: Area accessibly only by
the left arm system
331
Summary of Contents for X-SEL PX
Page 1: ...Operation ManualSeventh Edition X SEL Controller PX QX Type Tenth Edition ...
Page 2: ......
Page 8: ......
Page 14: ......
Page 410: ...383 Appendix 386 ...
Page 452: ...425 Appendix 5 428 ...
Page 559: ......