





























207
Part 4 Commands
CANC (Cancel: Declare axis port to abort)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional CANC
(Input port,
global flag) (CANC type)
CP
[Function] Declare an input port or global flag to abort while a servo command is being executed.
When operation is performed on the input port or global flag specified in operand 1, the
current servo processing will be aborted. (If the axes are moving, they will decelerate to a
stop before the processing is aborted.)
If nothing is specified in operand 1, the current abort declaration will become invalid.
[CANC
type]
0 = Contact a (Deceleration stop)
1 = Contact b (Deceleration stop)
The CANC type is set to “0” (contact a) when the program is started.
If nothing is specified in operand 2, the current CANC type will be used.
(Note 1)
The input port or global flag specified by a CANC command will only abort the axes used in
the task (program) in which the CANC is declared. The declaration will not be valid on axes
used in different tasks (programs).
(Note 2)
An input port or global flag to pause is valid for all active servo commands other than a
SVOF command. (A deceleration stop will also be triggered in PATH operation.)
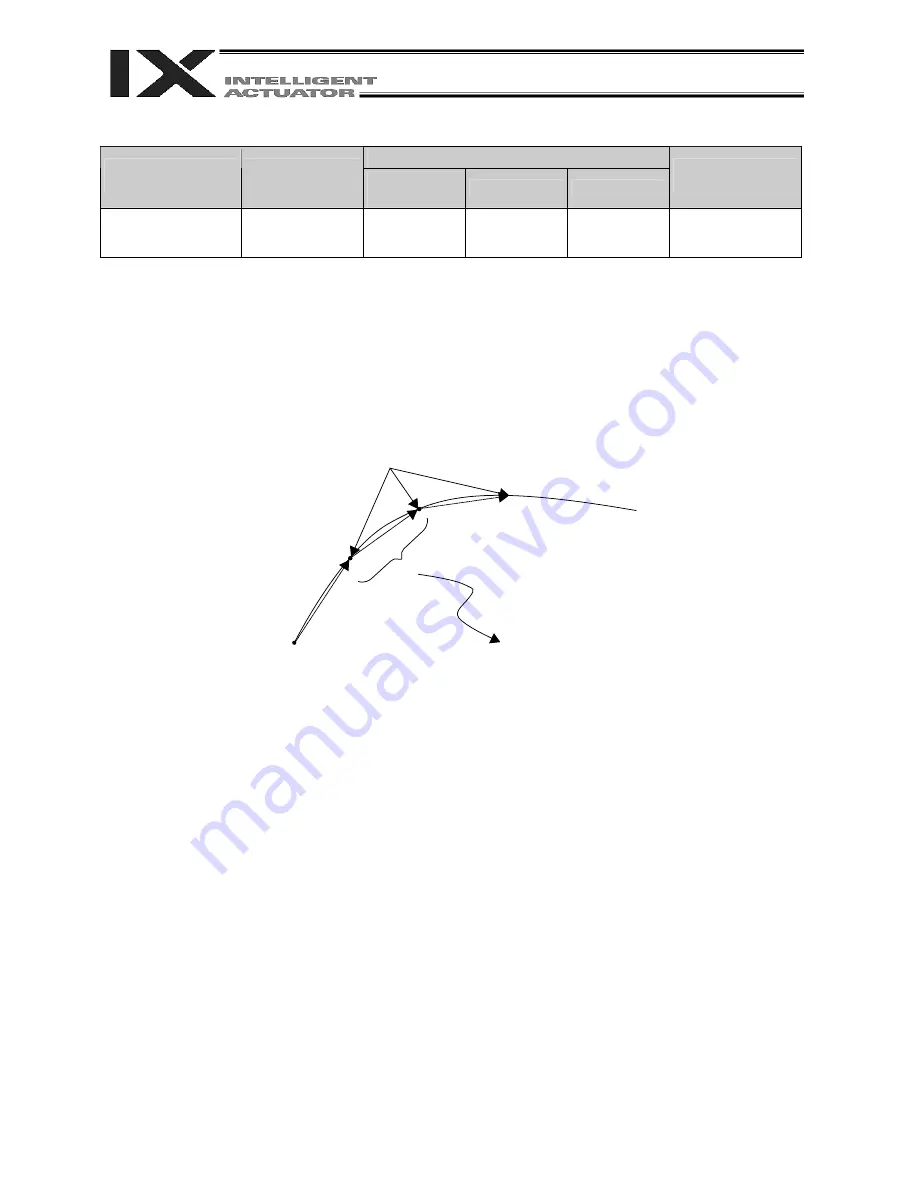
[Example]
CANC
14
0
The axes will decelerate to a stop when input port 14
turns ON.
Not executed.
Input port 14 ON
Movement is complete.
Remaining operation
V
T
208
Part 4 Commands
DIS (Set division distance at spline movement)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional
Optional
DIS
Distance Prohibited
CP
[Function] Set a division distance for the interpolation implemented by a PSPL (move along spline)
command.
When a PSPL command is executed, a passing point will be calculated at each distance
set here and the calculated passing points will be used as interpolation points.
If the distance is set to “0,” an appropriate division distance will be calculated automatically
so that the actuator will operate at the set speed
The distance is input in mm.
(Note)
If a PSPL command is executed without setting a distance with a DIS command, the default
value registered in “All-axis parameter No. 31, Default division distance” will be used.
[Example]
DIS
10
Set the division distance to 10 mm.
Interpolation points
Division distance
211
Summary of Contents for X-SEL PX
Page 1: ...Operation ManualSeventh Edition X SEL Controller PX QX Type Tenth Edition ...
Page 2: ......
Page 8: ......
Page 14: ......
Page 410: ...383 Appendix 386 ...
Page 452: ...425 Appendix 5 428 ...
Page 559: ......