





























233
Part 4 Commands
MVLI (Move via incremental interpolation in CP operation)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional MVLI Position
number
Prohibited PE
[Function] Move the actuator, with interpolation, from the current position by the travel distance
corresponding to the position number specified in operand 1.
The output will turn OFF at the start of axis movement, and turn ON when the movement is
complete.
(Note 1)
Movement to any position where target values for both SCARA and linear movement axes
are specified simultaneously is prohibited (“Error No. 421, SCARA/linear movement axis
simultaneous specification error”).
To perform any operation meeting the above condition, use a GRP command or set
different position data for SCARA axes and for linear movement axes.
(Note 2)
With a SCARA axis, repeated use of incremental (relative) movement commands (MVPI,
MVLI, TMPI and TMLI) will accumulate coordinate-conversion rounding errors. To eliminate
these errors, execute an absolute movement command (MOVP, MOVL, etc.).
[Example 1]
MVLI
6
Each axis will move from the current position by the
travel amount specified in position No. 6.
If the current positions are (200, 150, 50, 45) as
specified in position No. 5 and the travel amounts are
(15, 30, 20, 30) as specified in position No. 6, the
positions after movement will become (215, 180, 70, 75).
(Note)
In the case of a SCARA axis, the axis will move based on the value of all-axis parameter No.
11, “Default SCARA axis CP acceleration” or all-axis parameter No. 12, “Default SCARA axis
CP deceleration” if the acceleration or deceleration is not set by an ACC (DCL) command.
In the case of a linear movement axis, the axis will move based on the value of all-axis
parameter No. 200, “Default linear movement axis acceleration” or all-axis parameter No.
201, “Default linear movement axis deceleration” if the acceleration or deceleration is not set
by an ACC (DCL) command.
Travel path from position No. 5 by the travel distance corresponding to position No. 6
With SCARA, the center of the tool-mounting
surface or the tool tip will move linearly.
+Y direction
+Z direction
+X direction
234
Part 4 Commands
PATH (Move along path in CP operation)
Command, declaration
Extension condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
Optional Optional PATH
Start
position
number
End
position
number
PE
[Function] Move continuously from the position specified in operand 1 to the position specified in
operand 2.
The output type in the output field can be set using an actuator-declaration command
POTP.
Increasing the acceleration will make the passing points closer to the specified positions.
If invalid data is set for any position number between the start and end position numbers,
that position number will be skipped during continuous movement.
(Note 1)
Movement to any position where target values for both SCARA and linear movement axes
are specified simultaneously is prohibited (“Error No. 421, SCARA/linear movement axis
simultaneous specification error”).
To perform any operation meeting the above condition, use a GRP command or set
different position data for SCARA axes and for linear movement axes.
(Note 2)
Multi-dimensional movement can be performed using a PATH command.
In this case, input in operand 1 the point number of the next target, instead of the predicted
current position upon execution of the applicable command.
(Inputting a point number corresponding to the predicted current position will trigger
movement to the same point during continuous movement, thereby causing the speed to
drop.)
(Note 3)
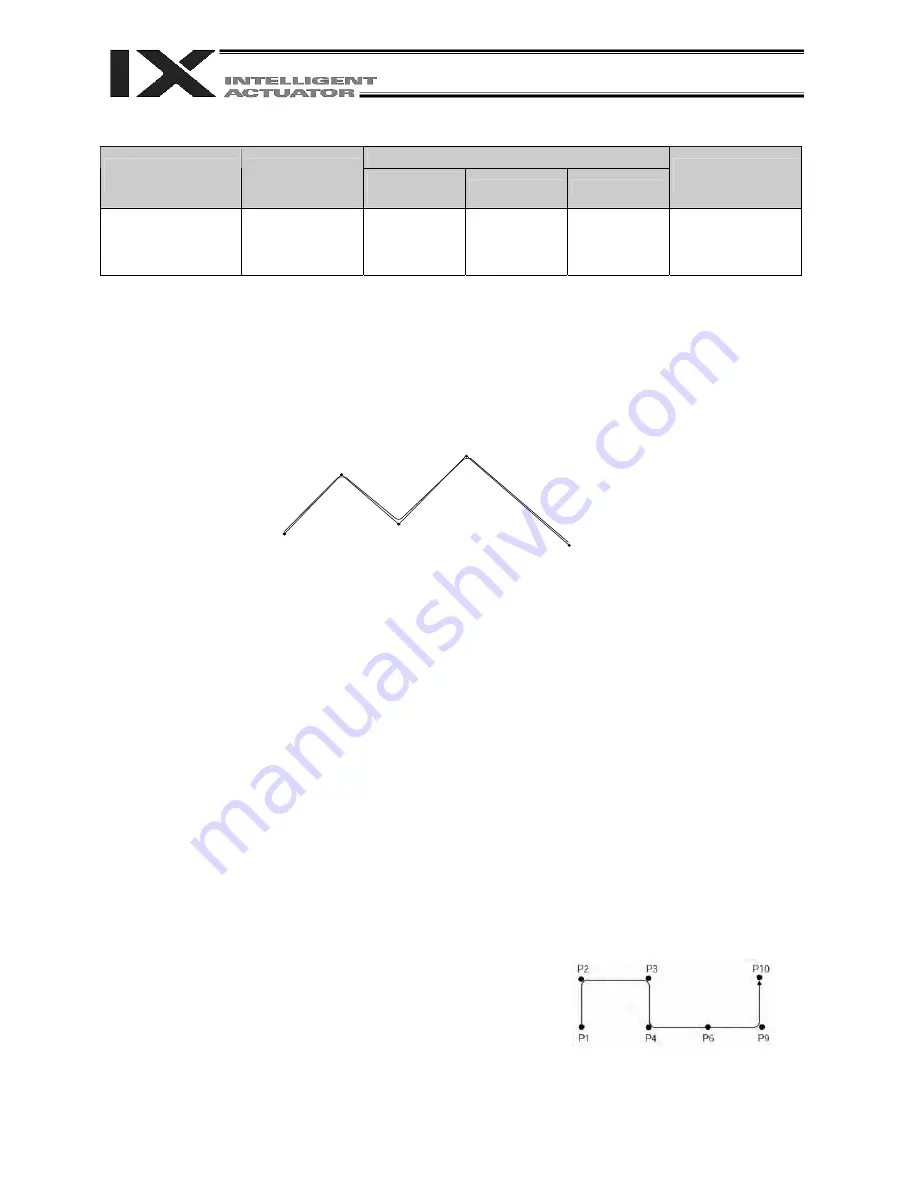
It is also possible to move the axis continuously along a path that passes one discontinuous
position.
As shown in the example, specify the number corresponding to the discontinuous position
for both the start position number and end position number in the PATH command. In this
example, the discontinuous position is position No. 6.
[Example] The axis will move continuously in the sequence of position Nos. 1
2
3
4
6
9
10.
PATH 1 4
PATH
6
6
Discontinuous position
PATH 9 10
[Example 1]
PATH
100
120
Move continuously from position Nos. 100 to 120.
Start position
Position origin
End position
237
Summary of Contents for X-SEL PX
Page 1: ...Operation ManualSeventh Edition X SEL Controller PX QX Type Tenth Edition ...
Page 2: ......
Page 8: ......
Page 14: ......
Page 410: ...383 Appendix 386 ...
Page 452: ...425 Appendix 5 428 ...
Page 559: ......