





























2-16
IM 701210-05E
2.2 Setting the Horizontal and Vertical Axes
Frequency (Number of Rotations, Period, Duty Cycle, Power Supply Frequency, Pulse
Width, Pulse Integration, and Velocity) Measurement <Section 5.19>
The Frequency Module (701280 (FREQ)) measures frequency, number of rotations,
period, duty cycle, power supply frequency, pulse width, pulse integration, and velocity.
• Frequency
Tw(s)
Frequency (Hz) = 1/Tw (s)
Measurable range:
0.01 Hz to 200 kHz
• Period
Period (s) = Tw (s)
Measurable range:
5
µ
s to 50 s
• RPMs/RPSs
F(Hz)
Nr: The number
of pulses per rotation
RPMs = Frequency (Hz)/the number of pulses per rotation
(Nr)
×
60
Measurable range:
0.01 rpm to 100000 rpm
RPSs = Frequency (Hz)/the number of pulses per rotation (Nr)
Measurable range:
0.001 rps to 2000 rps
• Duty Cycle
Thigh(s)
Tw(s)
Tlow(s)
Duty cycle (%) = Thigh (s)/Tw (s)
Or, duty cycle (%) = Tlow (s)/Tw (s)
Measurable range:
0% to 100%
• Pulse Width
Thigh(s)
Tlow(s)
Pulse width (s) = Thigh (s)
or pulse width (s) = Tlow (s)
Measurable range:
2
µ
s to 50 s
• Power Supply Frequency
Tw(s)
Power supply frequency (Hz) = 1/Tw (s)
Resolution:
0.0 1Hz
Measurable range:
(50 Hz, 60 Hz, or 400 Hz)
±
20 Hz
• Pulse Integration (Distance/Flow Rate)
N (count)
l
Pulse integrated value = N (count)
×
physical amount per
pulse (I)
Set the physical amount per pulse (I) to distance or flow rate.
A suitable user-defined unit can be assigned to the specified
physical amount.
Measurable range:
Up to 2
×
10
9
counts
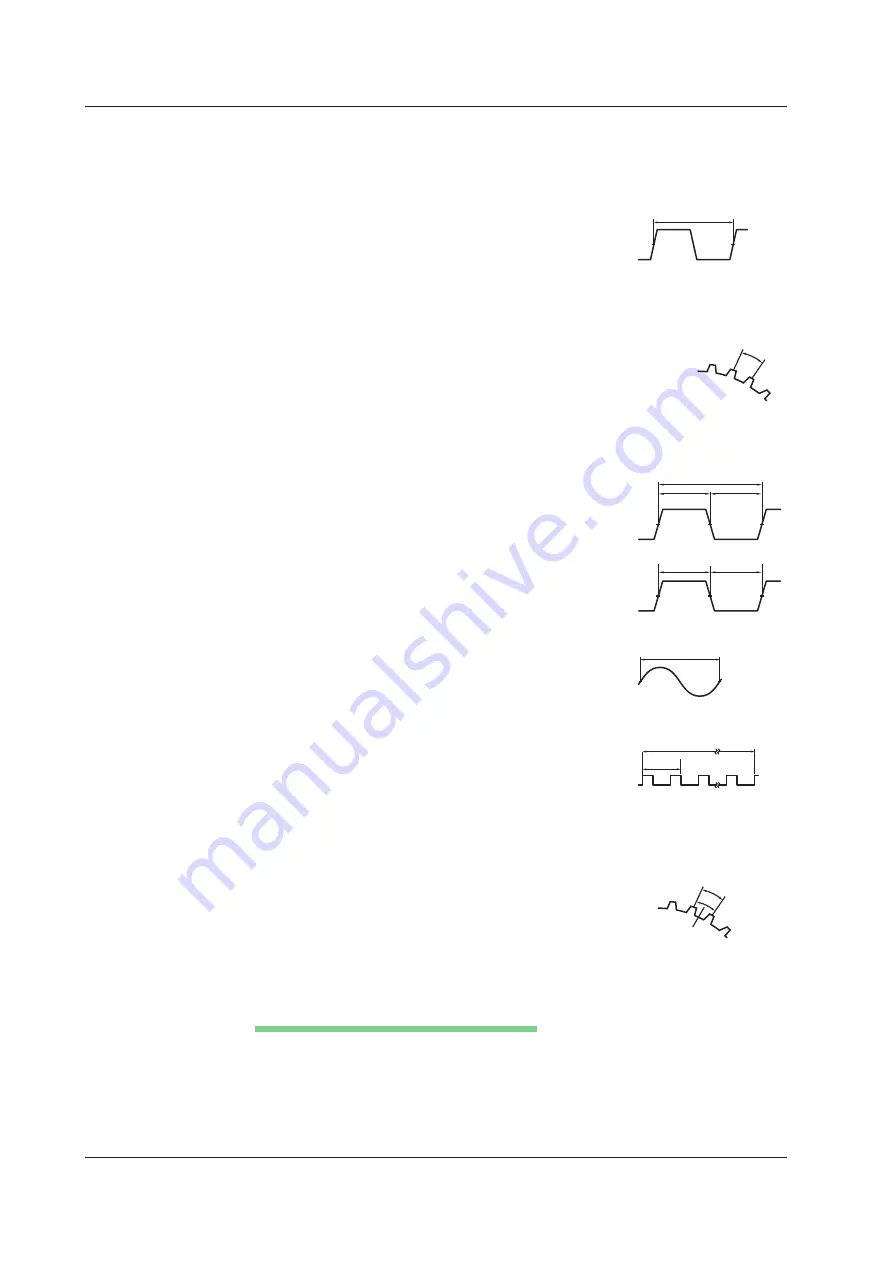
• Velocity
Tw(s)
Distance
per pulse (l)
Velocity (km/h) = Distance per pulse l (km)/Tw (s)
×
3600
Velocity (m/s) = Distance per pulse l (m)/Tw (s)
The distance and unit can be user defined
(angular velocity, etc.).
Measurable range:
F (=1/Tw) = 0.01 Hz to 200 kHz
Deceleration Prediction and Stop Prediction
The 701280 (FREQ) automatically performs internal computation and displays
waveforms by predicting the deceleration curve and stop point even when the input pulse
is suddenly cut off. This function allows the measurement of waveforms of deceleration
behavior that is close to the actual physical phenomenon in applications in which the
deceleration behavior of an object that have inertia is measured such as in the brake test
of automobiles.