





























14 Application Precautions
14.2.3 Parameter Settings
14-10
14.2.3 Parameter Settings
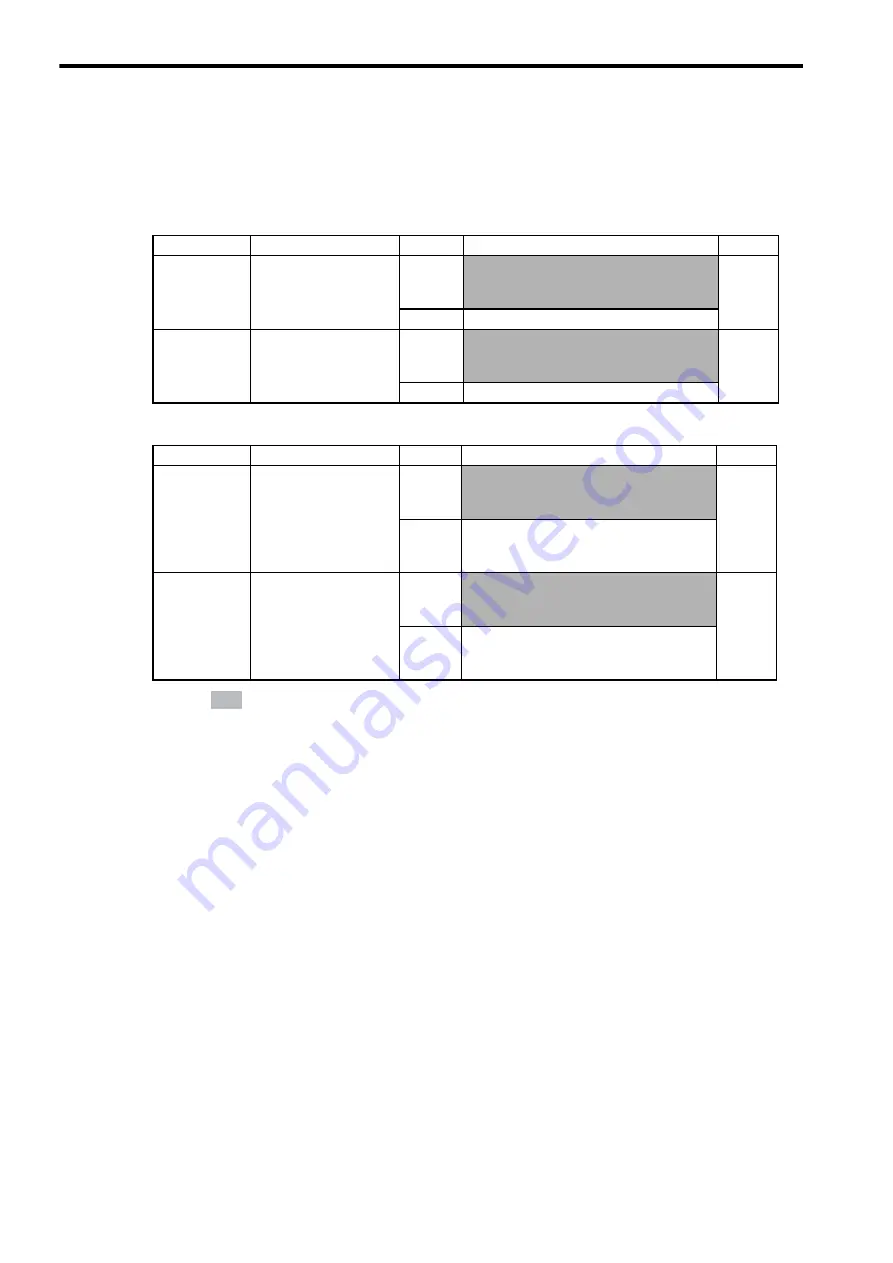
(1) Using/Not Using Overtravel Input Signals
The following parameters are used to enable and disable using the overtravel input signals.
(a) SGDH-
E or SGDS-
1
SERVOPACK
(b) SGD-
N or SGDB-
AN SERVOPACK
Note:
: Recommended setting.
Parameter Contents Setting
Item
Default
Pn50A.3
P-OT Signal Mapping
2
Enables use of Positive Prohibit Input
Signal (P-OT). (Forward rotation
prohibited when open, allowed for 0 V.)
2
8
Disables the P-OT signal.
Pn50B.0
N-OT Signal Mapping
3
Enables use of Negative Prohibit Input
Signal (N-OT). (Reverse rotation
prohibited when open, allowed for 0 V.)
3
8
Disables the N-OT signal.
Parameter Contents Setting
Item
Default
Cn-01, bit 2
Use/Not Use P-OT Input
Signal
0
Enables use of Positive Prohibit Input
Signal (P-OT). (Forward rotation
prohibited when open, allowed for 0 V.)
0
1
Disables use of Positive Prohibit Input
Signal (P-OT). (Foward rotation always
allowed.)
Cn-01, bit 3
Use/Not Use N-OT Input
Signal
0
Enables use of Negative Prohibit Input
Signal (N-OT). (Reverse rotation
prohibited when open, allowed for 0 V.)
0
1
Disables use of Negative Prohibit Input
Signal (N-OT). (Reverse rotation always
allowed.)







































































