





























11 SVR Virtual Motion Module
11.3.2 Motion Command Details
11-20
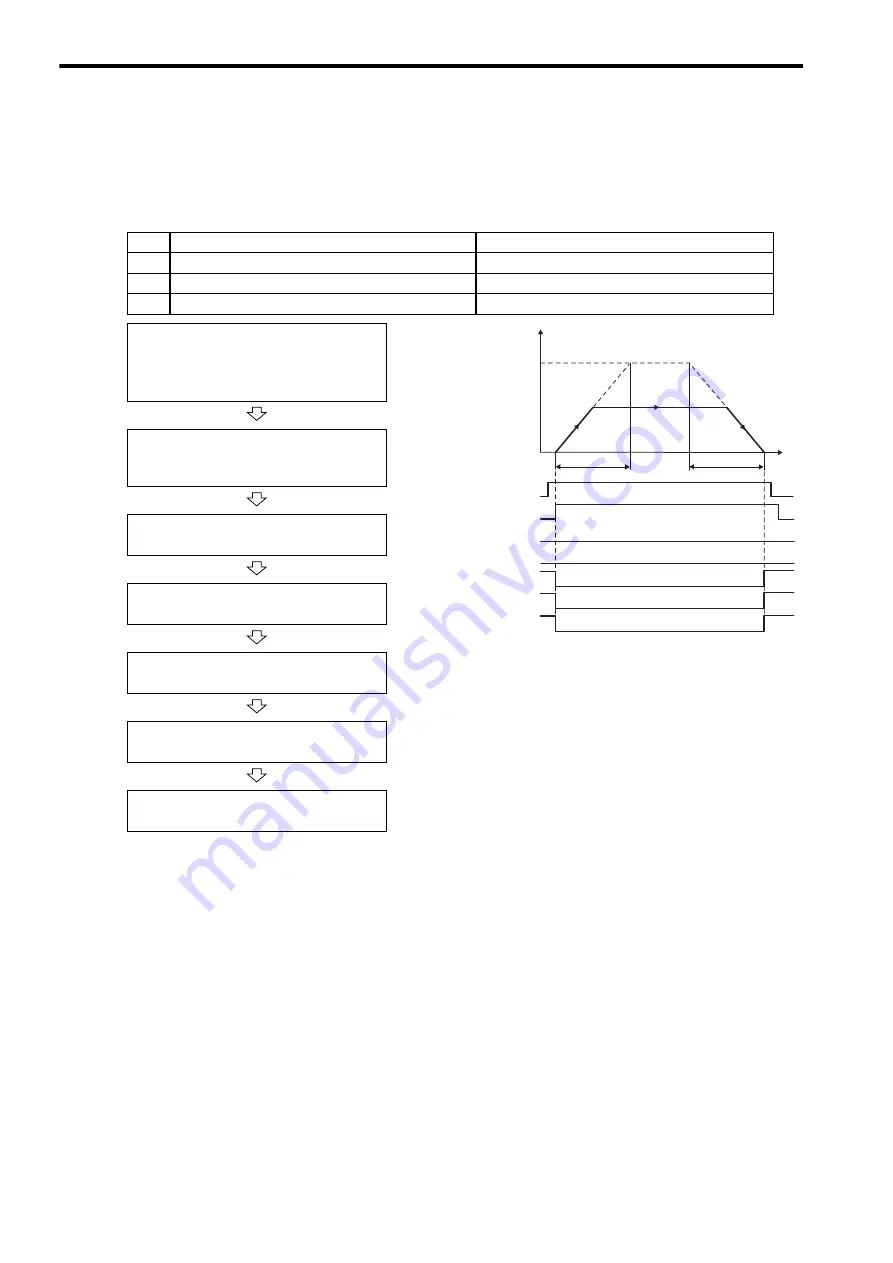
(2) External Positioning (EX_POSING)
The latch function cannot be used for the SVR. EX_POSING thus performs the same operation as the POSING
command.
(a) Operating Procedure
* If the Position Reference Type (OB
095) is set for an absolute mode, the target position can be set
before executing the command.
Note: The following position information is updated during command execution.
• Machine Coordinate Target Position (TPOS) (IL
OE)
• Target Position (CPOS) (IL
10)
• Machine Coordinate System Position (MPOS) (IL
12): MPOS is always equal to CPOS.
• Machine Coordinate Feedback Position (APOS) (IL
16): APOS is always equal to CPOS.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL
02 and IL
04 are 0.
2
The Servo ON condition.
IB
001 is ON.
3
Motion command execution has been completed.
IW
08 is 0 and IB
090 is OFF.
Set the motion setting parameters.
• Positioning Speed: OL
10
• Acceleration/Deceleration Filter Type:
OW
03
• The target position can be changed while the axis is moving.
• The positioning speed can be changed while the axis is moving.
• Set OB
090 to 1 to pause the command.
• Set OB
091 to 1 or execute the NOP motion command to abort
the command.
Execute the External Positioning
(EX_POSING) motion command.
• Set OW
08 to 2.
Set the target position.
• Target Position Setting: OL
1C *
Positioning starts.
• IW
08 will be 2 during positioning.
Position proximity reached.
• IB
0C3 will turn ON.
Positioning completed.
• IB
0C1 will turn ON.
Execute NOP motion command.
• Set OW
08 to 0.
Linear acceleration time
Linear deceleration time
Feed speed
Rated speed
100%
0
Speed (%)
Time (t)
OW
08 = 2 (EX_POSING)
IW
08 = 2 (EX_POSING)
IB
090 (BUSY)
IB
098 (COMPLETE)
IB
0C0 (DEN)
IB
0C1 (POSCOMP)
IB
0C3 (NEAR)
Position
Reference







































































