
























7 Motion Parameters
7.2.1 Motion Fixed Parameter Details
7-8
(9) Encoder Settings
No. 34
Rated Speed
Setting Range
Setting Unit
Default Value
1 to 32000
min
−
1
3000
Set the rated motor speed in 1 min
−
1
units.
Set this parameter based on the specifications of the motor that is used.
No. 36
Encoder Resolution
Setting Range
Setting Unit
Default Value
1 to 2
31
−
1
pulse
65536
Set the number of feedback pulses per motor rotation.
Set the value after multiplication to match the specifications of the motor to be used. For example, if a 16-bit encoder is
used, set 2
16
= 65536.
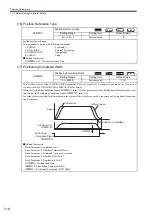
No. 38
Max. Revolution of Absolute Encoder
Setting Range
Setting Unit
Default Value
1 to 2
31
−
1
rev
65534
Set the maximum number of rotations for the absolute encoder when an absolute encoder is used.
Set it according to the setting of the encoder to be used.
•
Σ
Series: Always set to 99999.
•
Σ
-II or
Σ
-III Series: Set to the same value as the multiturn limit in the SERVOPACK.
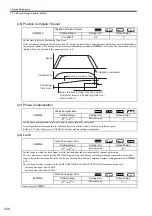
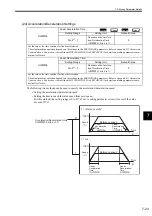
For axes set as infinite axes (Function Selection 1 (fixed parameter 1), bit 0 set to 1), set to 65534 max. (same value as
Pn205).
This parameter is used to manage position data when an absolute encoder is used and an infinite length axis has been set.
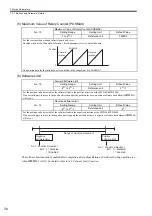
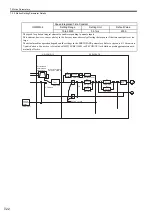
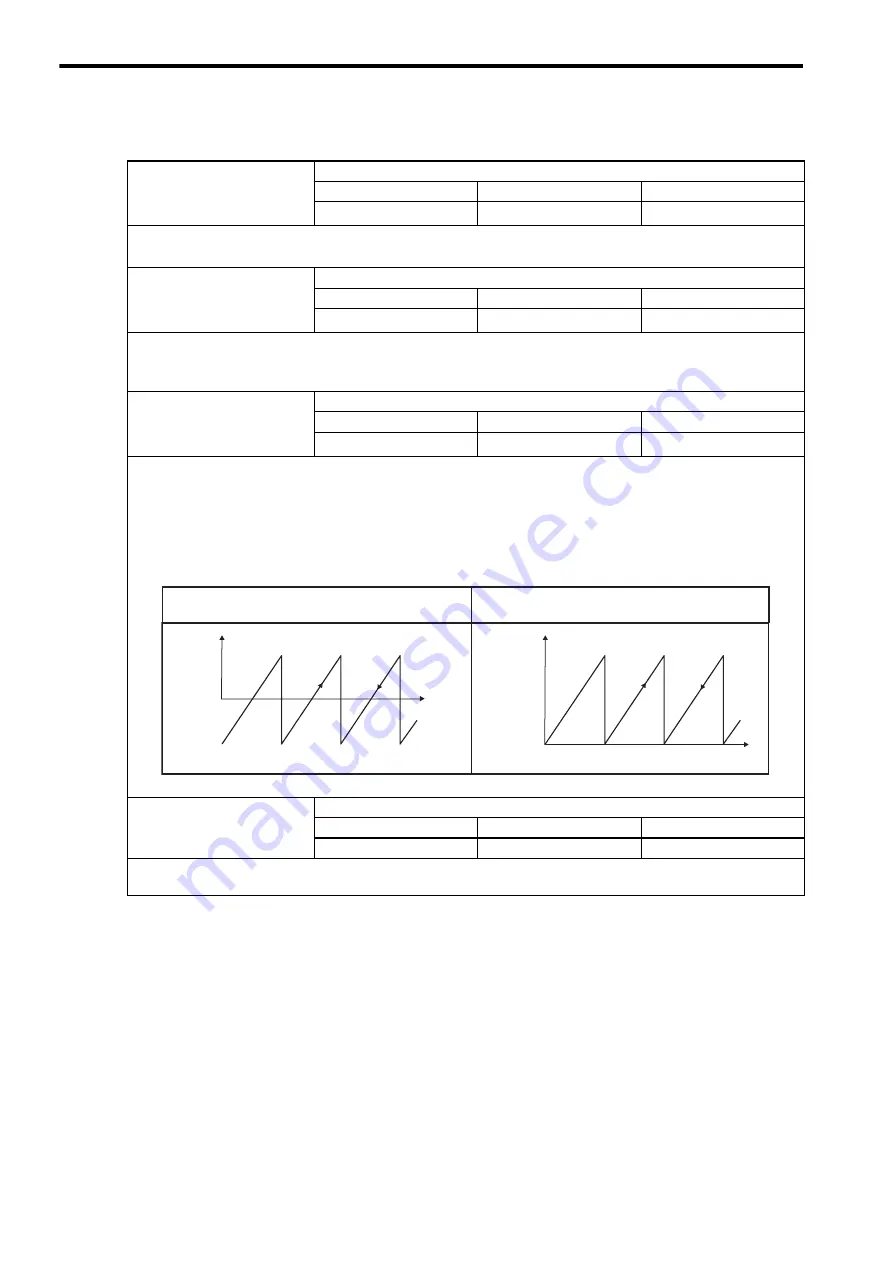
No. 42
Feedback Speed Moving Average Time Constant
Setting Range
Setting Unit
Default Value
0 to 32
ms
10
The Feedback Speed (monitoring parameter IL
40) is the value obtained by calculating the moving average for the time
constant from the feedback position for every scan.
0
0
+32767
−
32767
Pn205 value
Forward
rotation
Revolutions
Reverse
rotation
Multiturn
data
Forward
rotation
Revolutions
Reverse
rotation
Multiturn
data
Fixed Parameter 38, Pn205
= 65535
Fixed Parameter 38, Pn205
≠
65535







































































