




























10.3 Using an Absolute Encoder
10-25
10
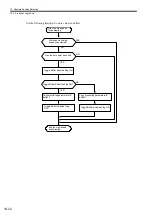
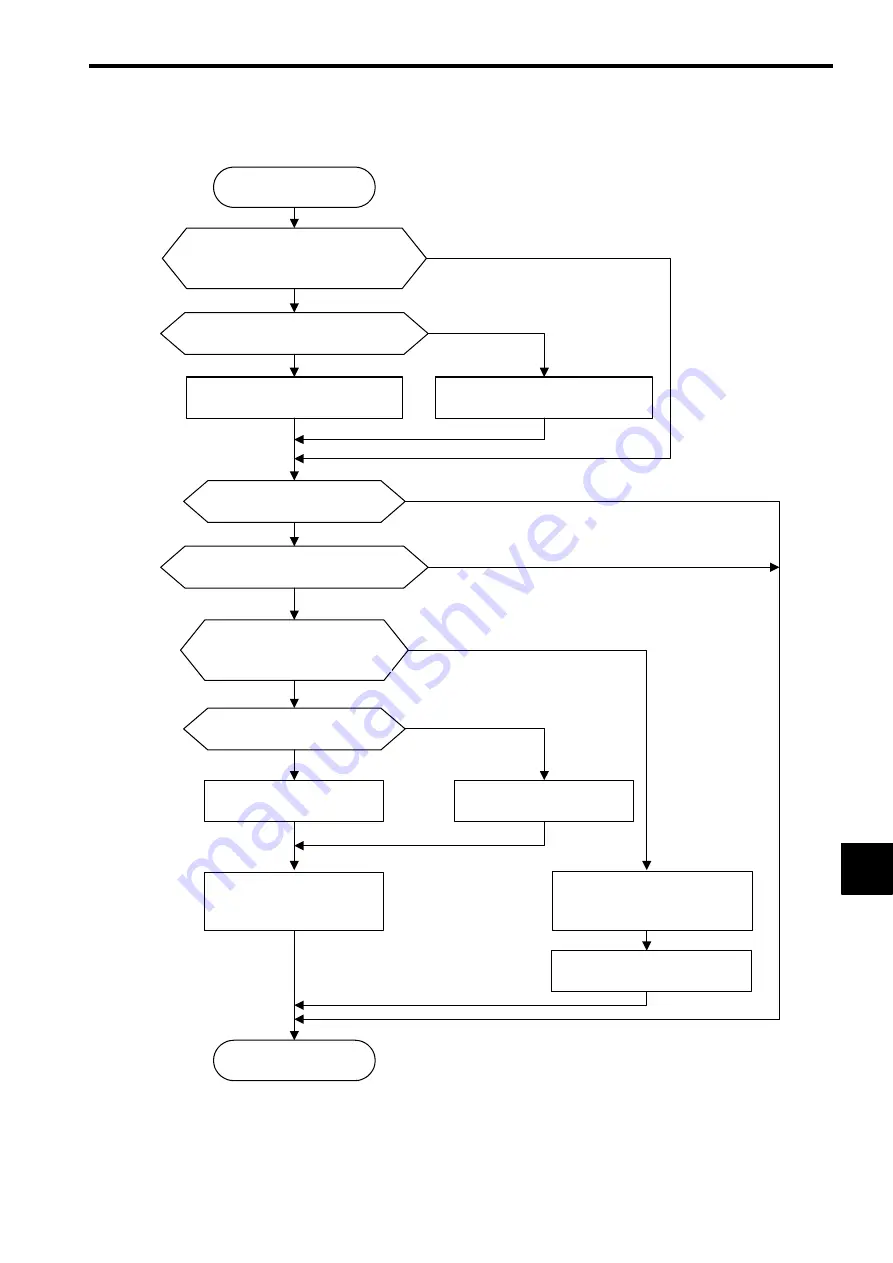
Use the following flowchart to set up position data again.
高速スキャン図面 始まり
高速スキャン始動後,
1
スキャン目か?
or
サーボ電源再投入信号
位置情報再セットアップ要求フラグ=
1
?
位置情報再セットアップ要求フラグ=
1
運転準備完了?
ABSシステム無限長位置管理情報
初期化完了フラグ=
0
?
トグルバッファ有効フラグ=
1
?
トルクバッファ選択フラグ=
1
?
バッファ
1
にモニタパラメータの
値をコピーする
ABSシステム無限長位置管理情報
初期化要求フラグ=
1
バッファ
0
にモニタパラメータの
値をコピーする
高速スキャン図面 終わり
ABSシステム無限長位置管理情報
初期化要求フラグ=
0
位置情報再セットアップ要求フラグ=
0
NO
YES
NO
YES
NO
YES
NO
YES
NO
YES
NO
YES
位置情報再セットアップ有効フラグ
0
=
Start the high-speed scan
drawing.
First scan after the start of high-speed
scan or signal indicating that the servo
power supply was turned back ON?
Toggle Buffer Enabled Flag ON?
Position Data Re-setup Request Flag
ON
Position Data Re-setup Request Flag
OFF
Motion Controller RUN Ready ON?
Position Data Re-setup Request Flag ON?
Absolute System Infinite Length
Position Control Information Load
Completed Flag OFF?
Toggle Buffer Selection Flag ON?
Copy
buffer 1 to setting
parameters.
Copy buffer 0 to setting
parameters.
Absolute system Infinite Axis
Position Control Data
Initialization Request Flag ON
Absolute System Infinite Length
Position Control Data Initialization
Request Flag OFF
Position Data Re-setup Enabled
Flag OFF
End the high-speed scan
drawing.







































































