























10.2 Startup the Absolute Position Detection Function
10-5
10
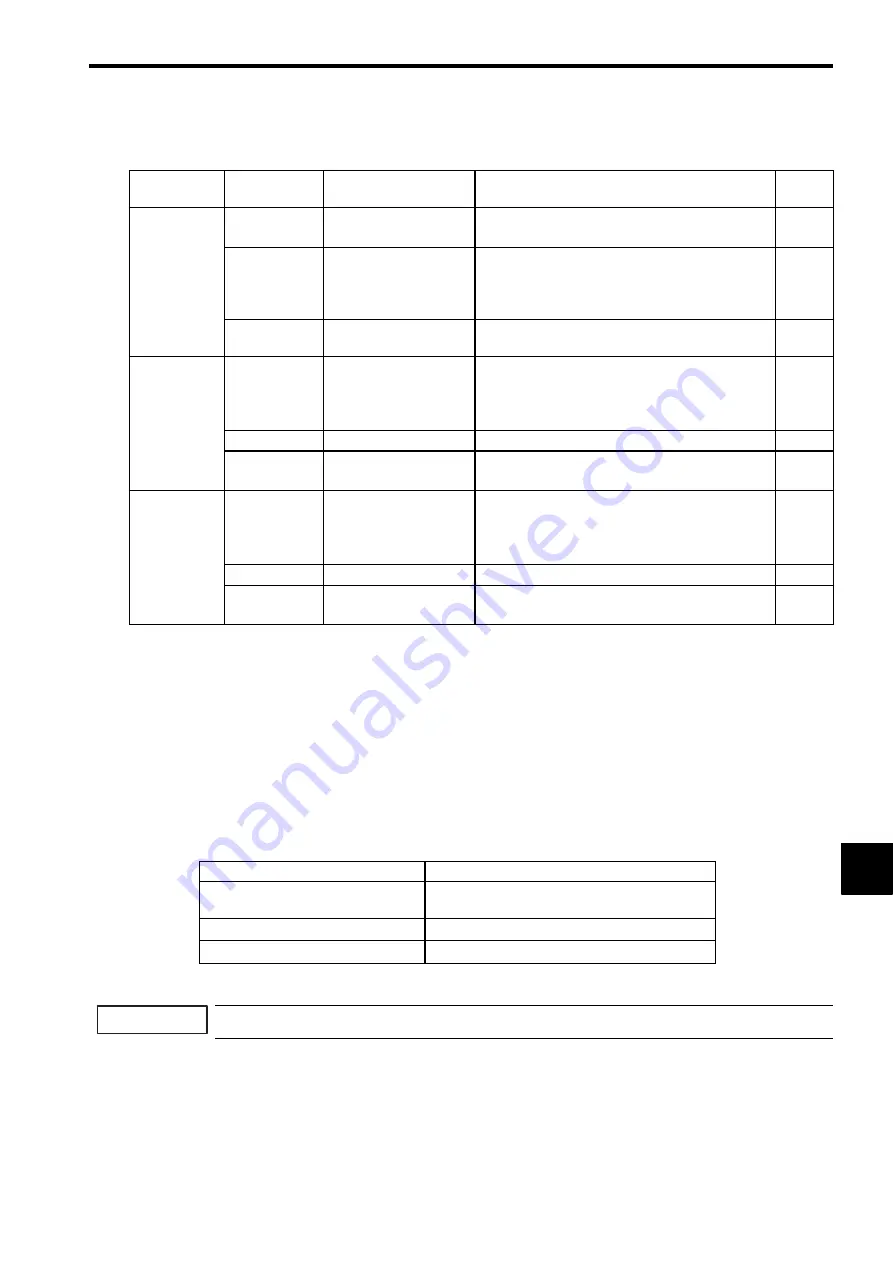
(2) SERVOPACK Parameters
* 1.
Σ
Series
:
SGD
-
N
,
SGDB-
AN
* 2.
Σ
-II Series
:
SGDH-
E + NS100
,
NS115
* 3.
Σ
-III Series
:
SGDS-
1
(3) Detailed Descriptions
(a) Encoder Selection
• MP2100/MP2100M fixed parameter 30
• SERVOPACK parameter Cn-0001, bit E or Pn002.2
For an axis performing absolute position detection, set MP2100/MP2100M fixed parameter 30 and
SERVOPACK parameter Cn-0001, bit E, or parameter Pn002.2 as shown in the following table.
Both the MP2100/MP2100M and SERVOPACK parameters are valid, so be sure to set both of them.
If the above settings are not used, correct motion control will not be performed. Set the parameters carefully.
SERVOPACK
Model
Parameter
Name
Setting Range
Units
Σ
Series
*1
Cn-0001, bit E
Encoder Selection
0: Incremental encoder
1: Absolute encoder
-
Cn-0002, bit 0
Rotation Direction
Selection
0: Sets counterclockwise (CCW) rotation as forward
rotation.
1: Sets clockwise (CW) rotation as forward rotation
(reverse rotation mode).
-
Cn-0011
Number of Encoder
Pulses
513 to 32767
P/R
Σ
-II Series
*2
Pn000.0
Direction Selection
0: Sets counterclockwise (CCW) rotation as forward
direction.
1: Sets clockwise (CW) rotation as forward direction
(reverse rotation mode).
-
Pn205
Multiturn Limit Setting
0 to 65535
Rev
Pn002.2
Absolute Encoder Usage
0: Uses absolute encoder as an absolute encoder.
1: Uses absolute encoder as an incremental encoder.
-
Σ
-III Series
*3
Pn000.0
Direction Selection
0: Sets counterclockwise (CCW) rotation as forward
direction.
1: Sets clockwise (CW) rotation as forward direction
(reverse rotation mode).
-
Pn205
Multiturn Limit Setting
0 to 65535
Rev
Pn002.2
Absolute Encoder Usage
0: Uses absolute encoder as an absolute encoder.
1: Uses absolute encoder as an incremental encoder.
-
Parameter
Setting
MP2100/MP2100M fixed parameter
30
Absolute encoder
Σ
Series
Cn-0001, bit E
1: Absolute encoder
Σ
-II,
Σ
-III Series
Pn002.2
0: Uses absolute encoder as an absolute encoder.
IMPORTANT







































































