




























6 Basic System Operation
6.5.2 MP2100/MP2100M Self-configuration
6-32
(c) Motion Fixed Parameters
When self-configuration is executed, all motion fixed parameters, except the ones listed below, will return to
their default settings. For details on motion fixed parameters, refer to
Chapter 7 Motion Parameters
.
(d) Motion Setting Parameters
When self-configuration is executed, all motion setting parameters, except the ones listed below, will return
to their default settings. For details on motion setting parameters, refer to
Chapter 7 Motion Parameters
.
* The above processing is not performed for axes that already have parameter settings.
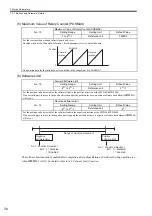
(e) SERVOPACK Parameters
When self-configuration is executed, the SERVOPACK parameters listed below will be rewritten. All other
parameters, however, will take the values read from the SERVOPACK’s parameters.
No.
Name
Set Value
30
Encoder Type
Value read from SERVOPACK’s parameters
34
Rated Speed
Value read from SERVOPACK’s parameters
36
Encoder Resolution
Value read from SERVOPACK’s parameters
38
Max. Revolution of Absolute
Encoder
Value read from SERVOPACK’s parameters
MP2100
SERVOPACK
Setting Parameter
SGD-N,
SGDB-N
SGDH+
NS100
SGDH+
NS115
SGDS
Position Loop Gain
OW
2E
←
Cn-001A
Pn102
Speed Loop Gain
OW
2F
←
Cn-0004
Pn100
Speed Feed Forward
Compensation
OW
30
←
Cn-001D
Pn109
Position Integration Time
Constant
OW
32
←
-
Pn11F
Speed Integration Time
Constant
OW
34
←
Cn-0005
Pn101
S-Curve Acceleration Time
OW
3A
←
Cn-0026
Pn812
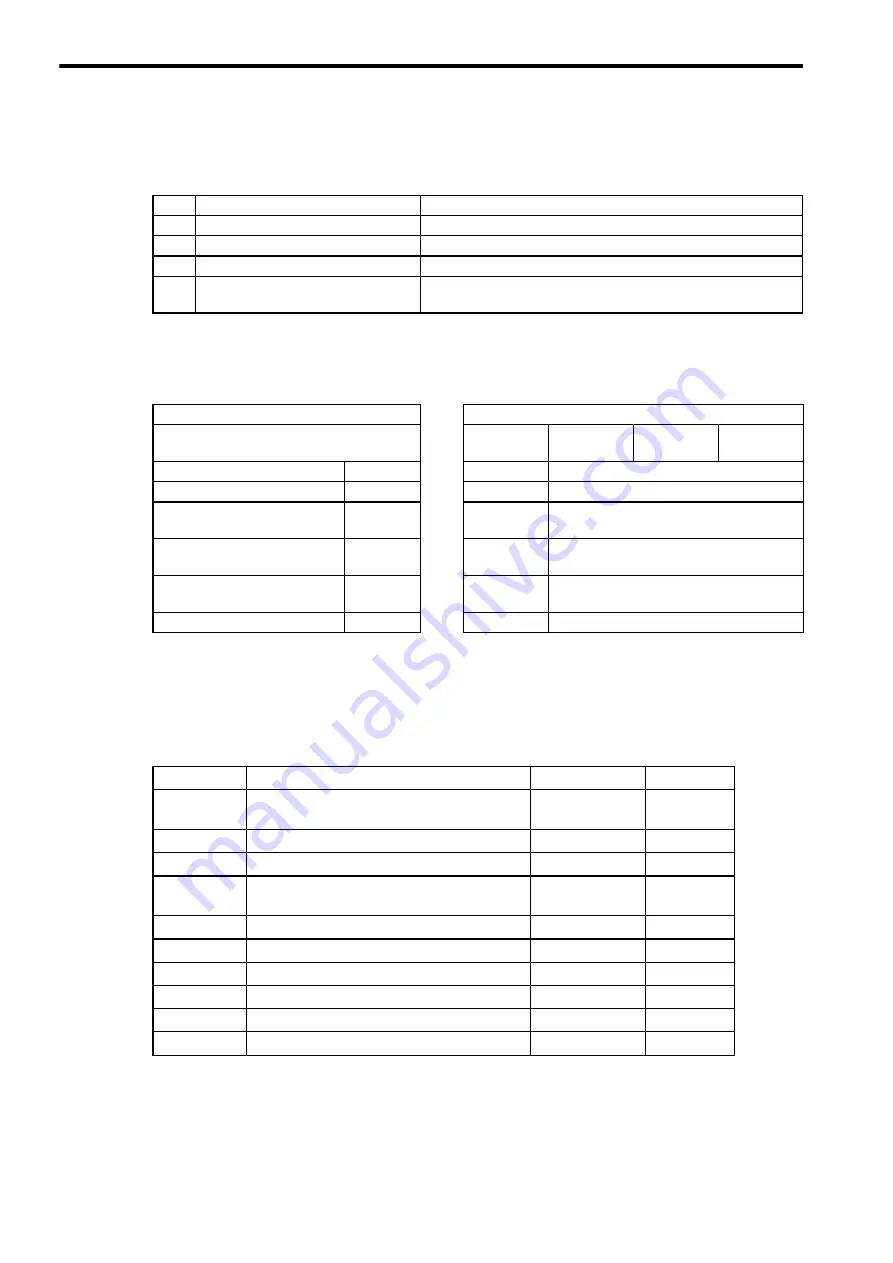
Table 6.1 SGD-N and SGDB Parameters
Parameter
Meaning
Default
Set Value
Cn-0001
Bits 2 and 3
Memory Switches 1
P-OT and N-OT Masks
0
1
Cn-0004
Speed Loop Gain
400
400
Cn-0005
Speed Loop Integration Time Constant
2000
2000
Cn-0014
Bits 2 and 3
Memory Switches 4
P-SOT and N-SOT Masks
0
1
Cn-001A
Position Loop Gain
4000
3000
Cn-001B
Positioning Completed Width
7
100
Cn-001D
Feed Forward Gain
0
0
Cn-001E
Following Error Overflow Range
65535
65535
Cn-0024
Electronic Gear Ratio B (Numerator)
4
1
Cn-0025
Electronic Gear Ratio A (Denominator)
1
1







































































