




























11.1 SVR Virtual Motion Module
11-3
11
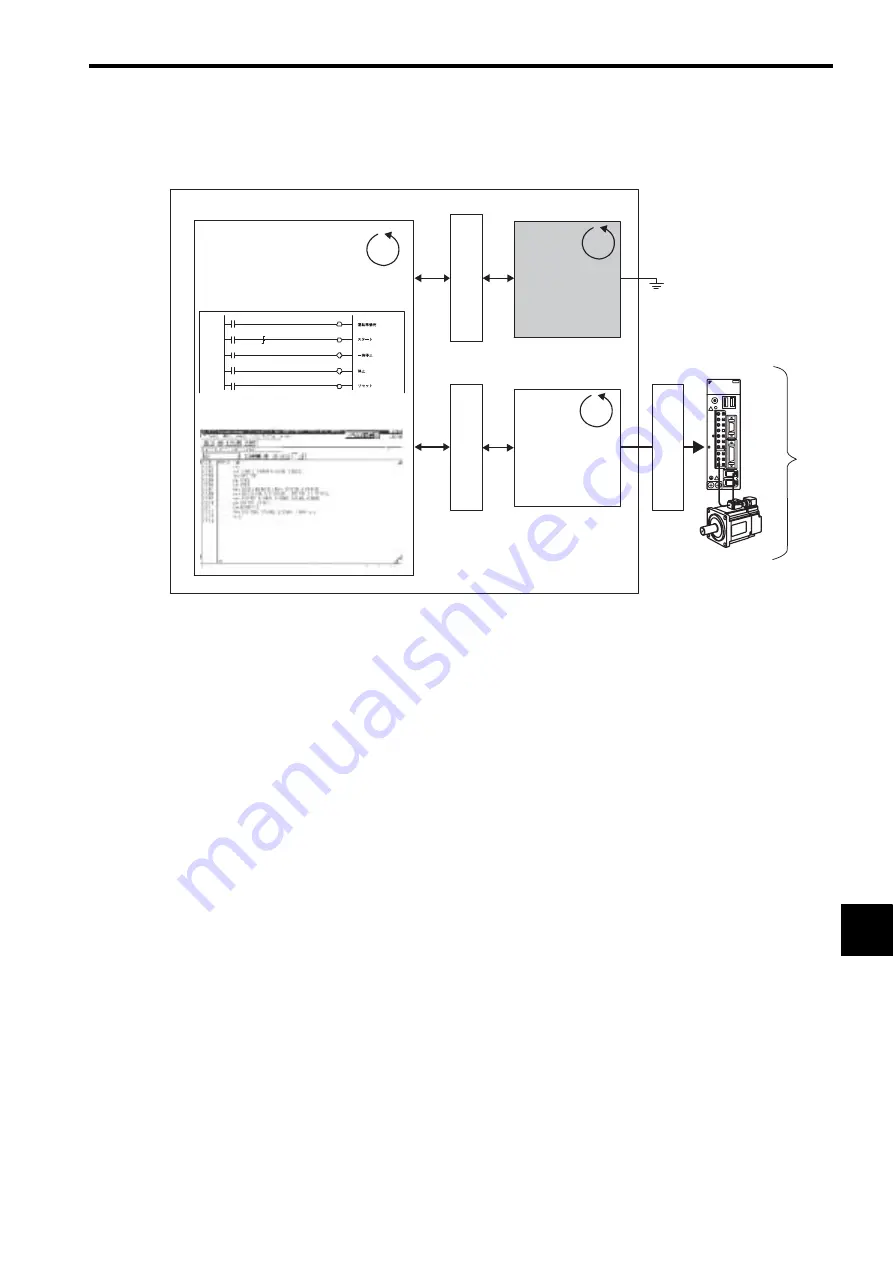
11.1.2 System Configuration
The following diagram shows an example MP2100/MP2100M system configuration.
Motion Parameters
Virtual servo axis
Actual Servo
Axes
MP2100/MP2100M
Motion
Parameters
1 0000
IB00000
DB000020
DB000010
IB00000
DB00000 0
IB00001
DB000011
1 0002
1 0005
IB00002
DB000012
1 0007
IB00005
DB000015
1 0009
Ladder program
Motion program
MECHA
TROLINK
SERVOPACK
YASKAWA SERVOPACK
200V
SGDS-01A12A
SW1
CHARGE
C
N
3
A/B
C
N
1
C
N
2
C
N
4
L1
L2
L2C
L1C
B1/
B2
U
V
W
C
N
6
Servomotor
SVR
Virtual
Motion
Module
High-speed
scan
High-speed
scan
High-speed
scan
SVB
Motion
Module







































































