





























4 - 49
4 Robot Instructions
NJ-series NJ Robotics CPU Unit User’s Manual (W539)
MC
_SyncL
inearCo
nvey
or
4
F
unct
ion
1
After the elapse of T2, the instruction creates command positions according to which the robot
moves down along Z axis.
At this moment, the robot does not stop.
2
After the elapse of (T2
+
(T3
−
T3
×
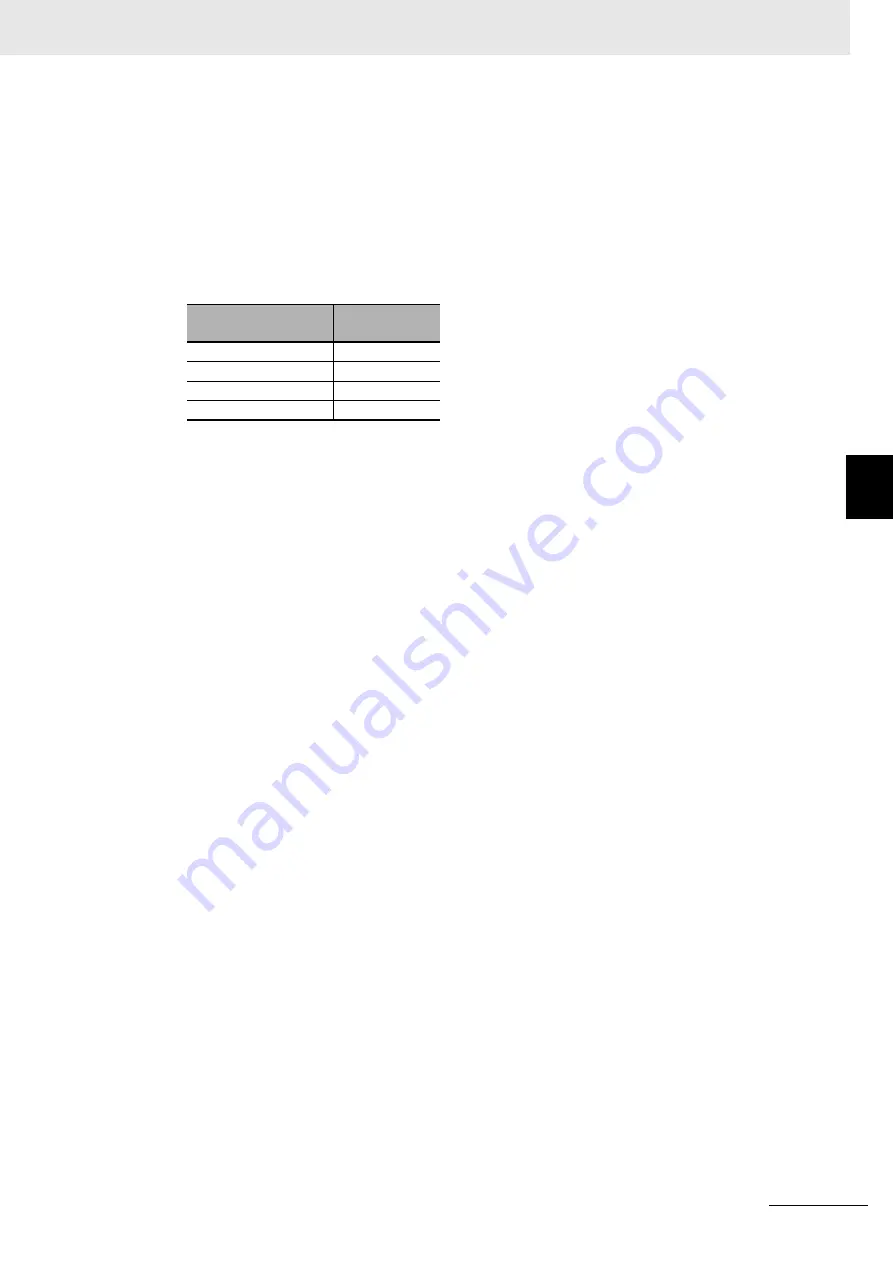
Ttrans2)), the instruction compares the command position
(X, Y) and the actual current position (X, Y) of the workpiece.
If the difference is within the following range,
InSync
changes to TRUE. If the difference
exceeds the following range, an error occurs and the axis stops. At this moment, the Workpiece
Synchronization Excessive Following error (error code: 6702 hex) occurs.
Setting Rotation:
In case of kinematics that includes the rotation of the wrist (Delta-3R), the final orientation of the
selected TCP is set in the Initial Workpiece Position and the direction to follow in the rotation axis in
the Direction input. The trajectory described in MC_SyncLinearConveyor (Start Conveyor Synchro-
nization) instruction is divided in 6 phases and it is possible to set when rotation is starting and when
is finishing through the Trajectory Transitions.
1
Rotation starts at the beginning of the phase which is specified as Initial Phase. The parameter
Rotation Transition 1 sets the Initial Phase.
2
Rotation finishes at the end of the phase which is specified as Final Phase. The parameter
Rotation Transition 2 sets the Final Phase.
It is only possible to set phases 0 to 4, because at the end of phase 4, synchronization is reached
and orientation of the robot must be already achieved.
The following are the limitations of Rotation Transitions.
• In case Rotation Transition 1 and Rotation Transition 2 are set to zero, rotation is disabled.
• In case Rotation Transition 1 is zero and Rotation Transition 2 is different than zero error will
occur.
• In case Rotation Transition 1 is different than zero and Rotation Transition 2 is zero error will
occur.
• In case Rotation Transition 1
>
Rotation Transition 2 error will occur.
• In case Rotation Transition 1 or Rotation Transition 2 are out of valid range error will occur.
• In case phase 1 is not performed (T1 = 0) and Rotation Transition 1 = 1 or Rotation Transition 1 =
2 an error will occur.
• In case phase 2 is not performed (“T1 – T1
×
Ttrans1” is less than Primary Cycle time), Rotation
Transition 1 is set to 2 and Rotation Transition 2 is also set to 2 an error will occur.
• In case phase 4 is not performed (“T3 – T3
×
Ttrans2” is less than Primary Cycle time), Rotation
Transition 1 is set to 4 and Rotation Transition 2 is also set to 4 an error will occur.
In all cases above error identifier is Illegal Trajectory Transitions (error code: 5716 hex).
Motion control
period
Range of
difference
500
μ
s
0.1 mm max.
1 ms
0.1 mm max.
2 ms
0.2 mm max.
4 ms
0.4 mm max.
Содержание NJ501-4300
Страница 13: ...11 CONTENTS NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 40: ...Revision History 38 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 90: ...2 Features of NJ Robotics CPU Unit 2 40 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 204: ...5 Vision Robot Integrated Simulation 5 6 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 308: ...6 Troubleshooting 6 104 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 333: ...I 1 I NJ series NJ Robotics CPU Unit User s Manual W539 Index ...
Страница 335: ......







































































