





























4 Robot Instructions
4 - 44
NJ-series NJ Robotics CPU Unit User’s Manual (W539)
•
InitWorkpiecePosition
(Initial Workpiece Position) of the workpiece that is tracked by the robot is set
in the position in the machine coordinate system (MCS) or user coordinate system (UCS).
• If you select the user coordinate system (UCS), set the user coordinate system number in
CSID
(Coordinate System ID).
• If this instruction is executed successfully, the workpiece position is updated as the conveyor axis
moves, and the command position is created for the updated workpiece position.
• If the workspace check is enabled and
InitWorkpiecePosition
(Initial Workpiece Position) is set out-
side the workspace, an error occurs and the axis stops. In the same way, the axis stops if the current
position is found outside the workspace.
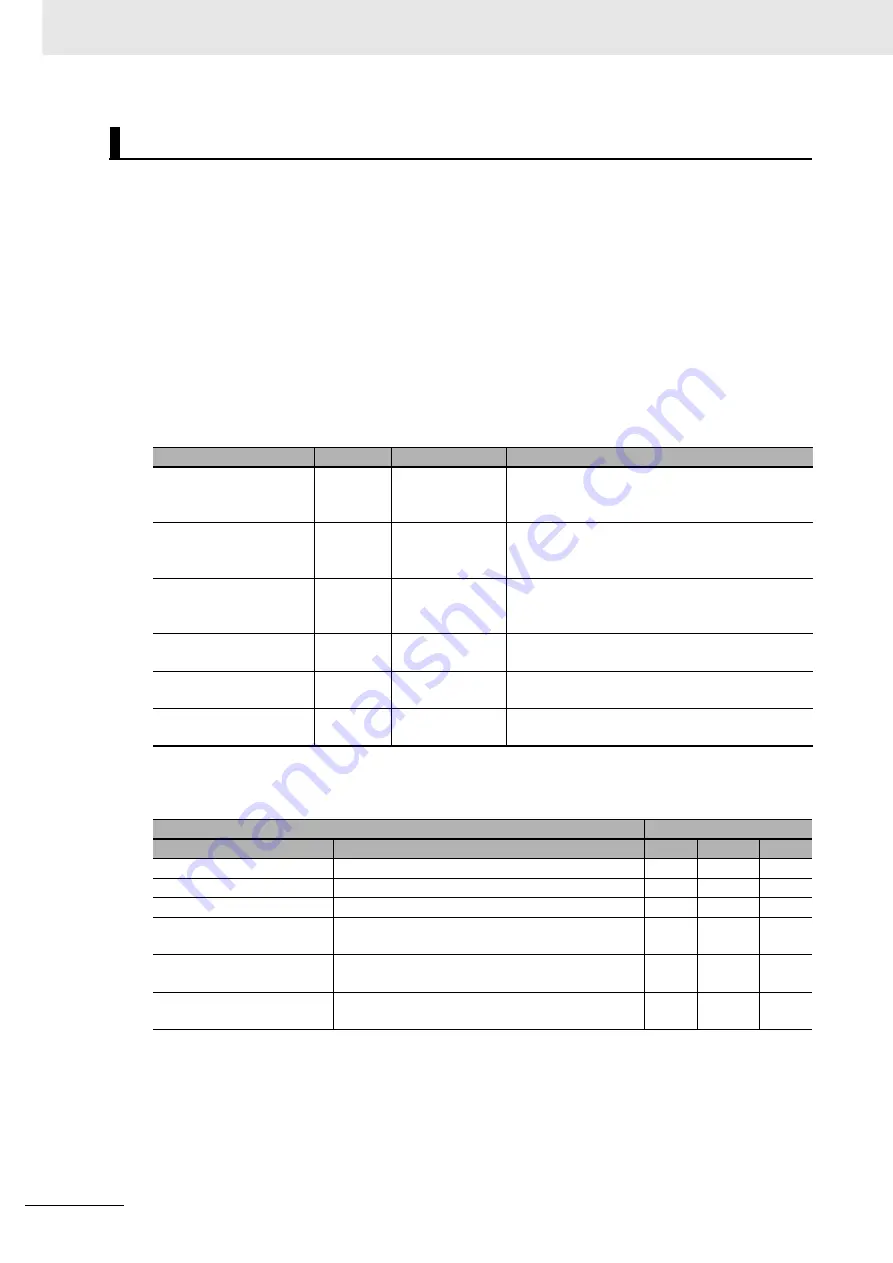
InitWorkpiecePosition
In this variable, set the workpiece current position at the point in time when the Conveyor Synchroni-
zation Start instruction is executed.
The current position you can set in
InitWorkpiecePosition
(Initial Workpiece Position) varies depend-
ing on
KinType
(Kinematics Type Selection) as shown below.
Workpiece Position Setting
Name
Data type
Valid range
Description
InitWorkpiecePosition [0] LREAL
Positive number,
negative num-
ber or 0
The current position of workpiece on X axis [mm]
InitWorkpiecePosition [1] LREAL
Positive number,
negative num-
ber or 0
The current position of workpiece on Y axis [mm]
InitWorkpiecePosition [2] LREAL
Positive number,
negative num-
ber or 0
The current position of workpiece on Z axis [mm]
InitWorkpiecePosition [3] LREAL
−
180.0 to 180.0
The current rotational position of workpiece
around X axis [degree]
InitWorkpiecePosition [4] LREAL
−
180.0 to 180.0
The current rotational position of workpiece
around Y axis [degree]
InitWorkpiecePosition [5] LREAL
−
180.0 to 180.0
The current rotational position of workpiece
around Z axis [degree]
Position
Kinematics type
Name
Description
Delta3 Delta3R Delta2
InitWorkpiecePosition [0]
The current position of workpiece on X axis [mm]
Valid
Valid
Valid
InitWorkpiecePosition [1]
The current position of workpiece on Y axis [mm]
Valid
Valid
Invalid
InitWorkpiecePosition [2]
The current position of workpiece on Z axis [mm]
Valid
Valid
Valid
InitWorkpiecePosition [3]
The current rotational position of workpiece
around X axis [degree]
Invalid
Invalid
Invalid
InitWorkpiecePosition [4]
The current rotational position of workpiece
around Y axis [degree]
Invalid
Invalid
Invalid
InitWorkpiecePosition [5]
The current rotational position of workpiece
around Z axis [degree]
Invalid
Valid
Invalid
Содержание NJ501-4300
Страница 13: ...11 CONTENTS NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 40: ...Revision History 38 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 90: ...2 Features of NJ Robotics CPU Unit 2 40 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 204: ...5 Vision Robot Integrated Simulation 5 6 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 308: ...6 Troubleshooting 6 104 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Страница 333: ...I 1 I NJ series NJ Robotics CPU Unit User s Manual W539 Index ...
Страница 335: ......







































































