





























319
CHAPTER 8 OPR CONTROL
8
8.
2 Mac
hine
O
P
R
8.2.2
Machine OPR method
The method by which the machine OP is established (method for judging the OP position and machine OPR
completion) is designated in the machine OPR according to the configuration and application of the positioning
method.
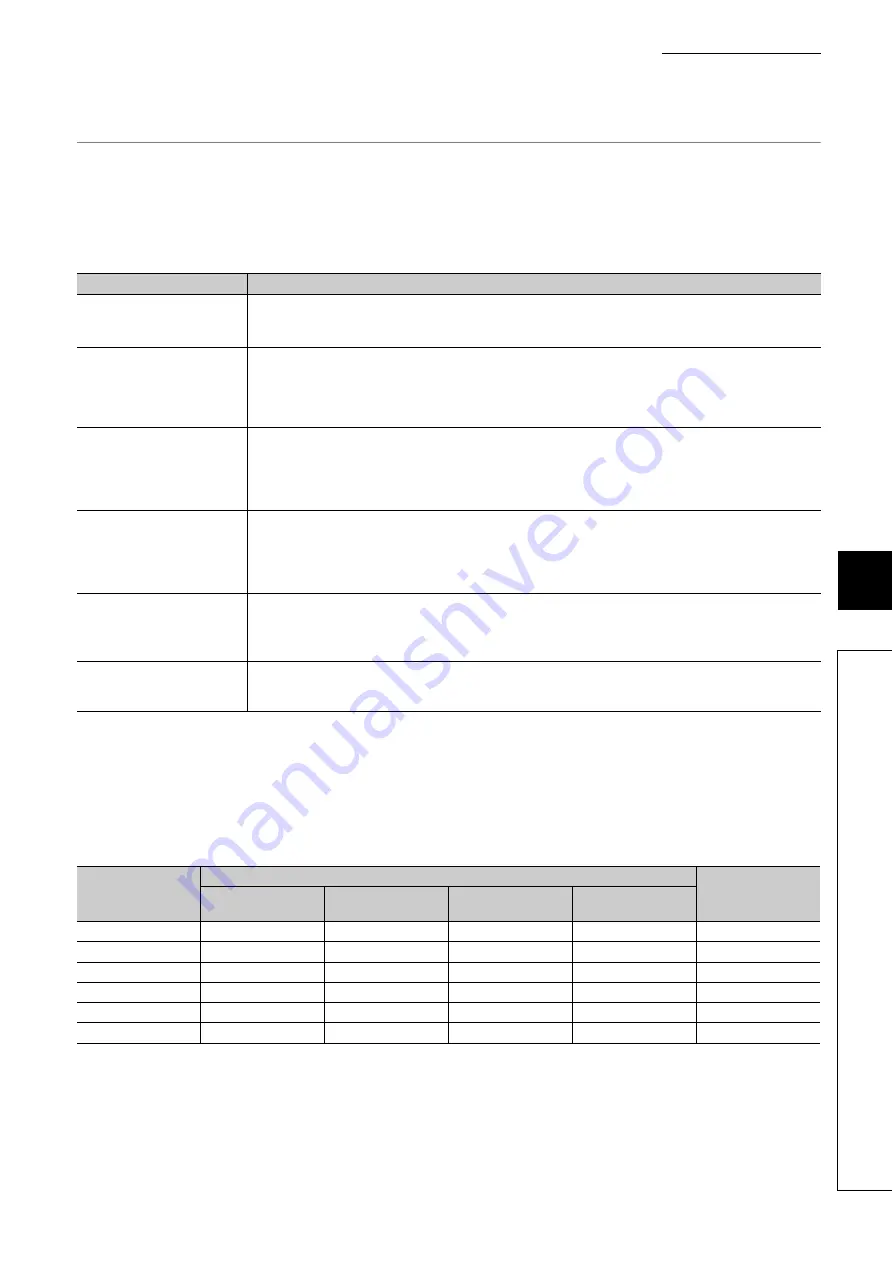
The following table shows the six methods that can be used for this OPR method. (The OPR method is one of the
items set in the OPR parameters. It is set in "[Pr.43] OPR method" of the basic parameters for OPR.)
*1
The following are the signals input as the zero signals of the LD75 in the corresponding OPR methods.
The following shows the external I/O signals used for machine OPR.
: Necessary,
: Necessary as required,
: Unnecessary
[Pr.43] OPR method
Operation details
Near-point dog method
Deceleration starts by the OFF
ON of the near-point dog. (Speed is reduced to "[Pr.47] Creep speed".)
The operation stops at the first zero signal
after the near-point dog turns from ON
OFF.
When a "deviation counter clear output" is completed, the machine OPR is completed.
Stopper method 1)
The stopper position is regarded as the OP.
After the deceleration starts by the OFF
ON of the near-point dog, the machine presses against the stopper at the
"[Pr.47] Creep speed" and stops.
The machine OPR is regarded as completed on completion of the deviation counter clear output provided after "[Pr.49]
OPR dwell time" passed after stoppage.
Stopper method 2)
The stopper position is regarded as the OP.
After the deceleration starts by the OFF
ON of the near-point dog, the machine presses against the stopper at the
"[Pr.47] Creep speed" and stops.
The machine OPR is regarded as completed on completion of the deviation counter clear output provided after the zero
signal
is detected after stoppage.
Stopper method 3)
The stopper position is regarded as the OP.
The machine starts at the "[Pr.47] Creep speed" from the beginning, then presses against the stopper at the "[Pr.47]
Creep speed" and stops.
The machine OPR is regarded as completed on completion of the deviation counter clear output provided after the zero
signal
is detected after stoppage.
Count method 1)
The deceleration starts by the OFF
ON of the near-point dog, and the machine moves at the "[Pr.47] Creep speed".
The machine stops at the zero signal
after moving the distance set in the "[Pr.50] Setting for the movement amount after
near-point dog ON" from the near point dog OFF
ON position. When a "deviation counter clear signal output" is
completed, the machine OPR is regarded as completed.
Count method 2)
The deceleration starts by the OFF
ON of the near-point dog, and the machine moves at the "[Pr.47] Creep speed".
The machine moves the distance set in the "[Pr.50] Setting for the movement amount after near-point dog ON" from the
near point dog OFF
ON position, and stops at that position. The machine OPR is then regarded as completed.
• Near-point dog method, count method 1)
Signal that is output as a single pulse at one motor revolution (e.g. Z-phase signal output from the drive unit)
• Stopper method 2), 3)
Signal that is output on detection of contact with the stopper (Input externally)
[Pr.43] OPR method
Signal required for control
Torque limit
Near-point dog
Zero signal
Upper/lower limit
switches
Deviation counter
clear output
Near-point dog method
Stopper method 1)
Stopper method 2)
Stopper method 3)
Count method 1)
Count method 2)
Содержание MELSEC-L LD75D
Страница 1: ...MELSEC L LD75P LD75D Positioning Module User s Manual LD75P1 LD75P2 LD75P4 LD75D1 LD75D2 LD75D4 ...
Страница 2: ......
Страница 11: ...9 Memo ...
Страница 47: ...45 CHAPTER 2 SYSTEM CONFIGURATION 2 2 1 General Image of System 1 When connected to a CPU module ...
Страница 176: ...174 ...
Страница 264: ...262 ...
Страница 266: ...264 ...
Страница 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 268: ...266 ...
Страница 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 270: ...268 ...
Страница 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 272: ...270 Z ABRST1 instruction execution ...
Страница 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 278: ...276 ...
Страница 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 280: ...278 ...
Страница 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 282: ...280 ...
Страница 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 284: ...282 ...
Страница 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 286: ...284 ...
Страница 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 316: ...314 Memo ...
Страница 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Страница 738: ...736 Memo ...
Страница 806: ...804 5 LD75D2 Unit mm 6 LD75D4 Unit mm 45 4 90 4 95 4 45 45 DIN rail center 45 4 90 4 95 4 45 45 DIN rail center ...
Страница 817: ......







































































