





























Firmware
≤
02.00 - DMS 2.1 EN - 03/2011
L
187
8400 motec | Software Manual
Basic functions
Holding brake control
8.2.1.5
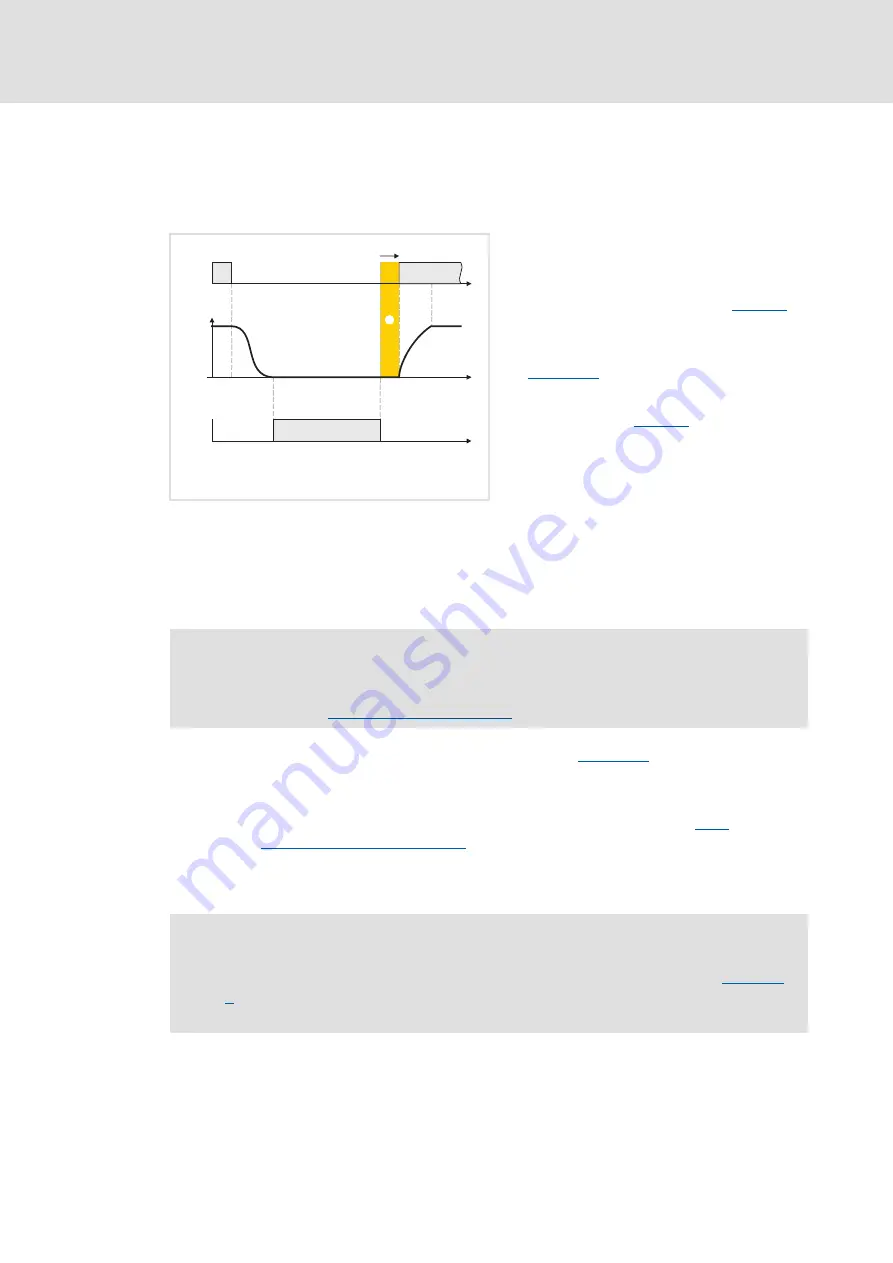
Motor magnetising time (only with asynchronous motor)
When an asynchronous motor is used, first the magnetic field required for the holding
torque is created (which is already available when a synchronous motor is used) after the
controller inhibit is deactivated and before the brake is released:
[8-4]
Chronological sequence of the brake output signal
8.2.1.6
Actual value monitoring
If an actual value monitoring time > 0 s is selected under
the actual speed time
monitoring is active.
The monitoring time starts when the speed setpoint has reached the lower switching
threshold and the actual speed is still above this threshold. (See figure
in chapter
If the actual speed is still above the threshold when the monitoring time has expired,
the brake will be automatically applied in the automatic brake control mode (mode 12).
n
Motor magnetising time (200 ms)
CINH = controller inhibit
The frequency related to the lower
speed threshold is output for 200 ms
unless the premagnetisation has not
been deactivated via bit 4 in
.
The same frequency is output to the
motor during the release time set in
.
The direction of rotation depends on
the settings in
(bit 2/3) and
the setpoint speed.
t
t
t
CINH
bBRKReleaseOut
I
BRK
200 ms
Note!
Function only possible if speed feedback via the digital input terminals DI1/DI2
is available.
Note!
In the Lenze setting, the actual speed time monitoring is deactivated (
= "0 s"), i.e. the brake will only be applied when the actual speed has reached
the lower switching threshold if speed feedback is available.
Содержание 8400 motec Series
Страница 375: ...L 375 ...