



























6
6
11
17
KEB COMBIVERT F5-M / S
Name: Basis
06.05.04
Section
Page
Date
©
KEB Antriebstechnik, 2002
All Rights reserved
Chapter
Functional Desription
Positioning and Synchronous Control
Start index new profile (PS.28)
This parameter
ï
defines an index (0...15), with which a new profile is started. The starting
index is also used, if the current positioning is aborted by the Start Posiì
signal and a new profile is started (PS.0 bit 3).
ï
is set-programmable, i.e. if at the same time the functions Ñset changeoverì
and ÑStart Posiì are assigned to a digital input, fixed positions can be directly
assigned to digital inputs.
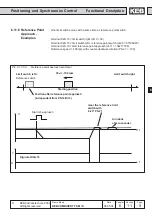
The position from index PS.28 (set dependently) is used, in order to compare it
with the actual position. A condition is an absolute index mode (PS.27). Hysteresis
is given over the target window. The actual position must be only within the target
window, in order to change the exit of 0 to 1. Only if the whole goal window will
leave, the exit from 1 changes to 0. This hysteresis is also with the function Ñdrive
is in the target windowì actively.
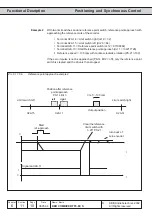
This parameter defines a window as target position. On reaching it the output
function ÑTarget windows reachedì (do.0...7 value Ñ54ì) is output. The adjustment of
this target window takes place within the range of -2
15
...2
15
-1 increments.
If the automatic brake control is to be used in the Posi mode, the source of rotational
direction (oP.1) must be adjusted to setpoint-dependent without LS (value 7).
The signal ÑTarget window reachedì comes before the completion of the reference
point run, thus before the signal ÑReference point run completedì for 100 ms and is
then reset.
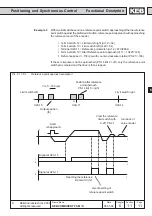
After the first positioning the target window is evaluated, i.e. only after the setpoint
profile has been travelled.
If the output function ÑTarget window reachedì = 54 is adjusted and the brake control
is activated, the drive waits with the engagement of the brake until the target window
is reached. The actual speed must be below the hysteresis level LE.16, before the
brake engages.
The output function is evaluated, if
ï
reference point run was executed
ï
the actual position is declared valid by manual setting, storing, flying
referencing, i.e. the target position was set with the referencing .
This parameter represents the maximum positioning speed in percent within the
range of 0...100 % referred to oP.10/11. The presetting is activated, when PS.0 bit
4 is set.
With the aid of the ÑAnalog parameter settingì (see Chapter 6.9.10) PS.30 can be
changed via an analog channel.
Target windows (PS.30)
Max. speed setting % (PS.31)