





























6
4
KEB COMBIVERT F5-M / S
14
Name: Basis
12.05.04
Chapter
Section
Page
Date
©
KEB Antriebstechnik, 2002
All Rights reserved
Functional Desription
Setpoint- and Ramp Adjustment
6.4.7
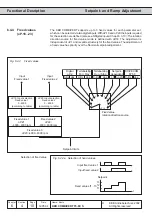
Ramp generator
The ramp generator assigns an adjustable time to a speed change, during this time
the change stall take place. The acceleration time (for pos. speed changes) and
deceleration time (for neg. speed changes) can be adjusted separately for both directions
of rotation. To enable jerk-free acceleration and deceleration, so-called S-curves can
be adjusted in addition to it.
The ramp times refer to 1000 rpm (at ud.3=0) and change in proportion to the mode.
The times to be adjusted are calculated as follows:
desired ramp time
speed change (
∆
n)
ñññññññññññññññññññññññññññññññññ
=
ñññññññññññññññññññ
ramp time to be adjusted (oP.28...oP.31)
1000 rpm (dep. on ud.2)
1000
800
0
∆
n
1000
500
∆
t
oP.28
∆
n
∆
t
oP.30
∆
t
∆
n
∆
n
oP.29
*
1
∆
t
oP.31
*
1
+n [rpm]
-n [rpm]
5s x 1000 rpm
oP.28 =ó ó ó ó ó ó ó ó ñ ñ ñ ñ ñ ñ ñ ñ = 4 , 5 s
1000 rpm -100 rpm
1000 rpm x real ramp time
oP.28...oP.31 = ñññññññññññññññññññññ
∆
n
A drive shall accelerate from 100 rpm to 1000 rpm in 5s.
Example
Time factor acceleration/
deceleration (oP.62)
The time factor extends the standard ramp time (oP.28...31) by the adjusted value.
The S-curve time do not change.
Value
Ramp time
0
adjusted value x 1
1
adjusted value x 2
2
adjusted value x 4
3
adjusted value x 8
4
adjusted value x 16
Rotation direction
clockwise
Rotation direction
counter-clockwise
oP.28
Acceleration time forward
oP.29
*
1
Acceleration time reverse
oP.30 *
2
Deceleration time forward
oP.31
*
1
Deceleration reverse
∆
n
Frequency change
∆
t
Acceleration time for
∆
n
Fig. 6.4.7
Acceleration and deceleration times
*1
If the value ÑForì is adjusted in these parameters (acceleration and deceleration times for rotation
direction reverse), then the values for rotation direction forward (oP.28 und oP.30) are valid.
*2
If the value ÑAccì is adjusted in this parameter, then the value for acceleration (oP.28) is valid.
Calculation of the
acceleration and
deceleration times: