





























75
SV200 DC Hardware Manual
920-0126A
4/14/2017
7.1.7 Motor Brake Control
A servo motor brake is only to be used for holding the load when the motor is disabled or powered OFF. It ensures the motor’s rotor
(and connected load) will NOT move due to gravity or any other external forces.
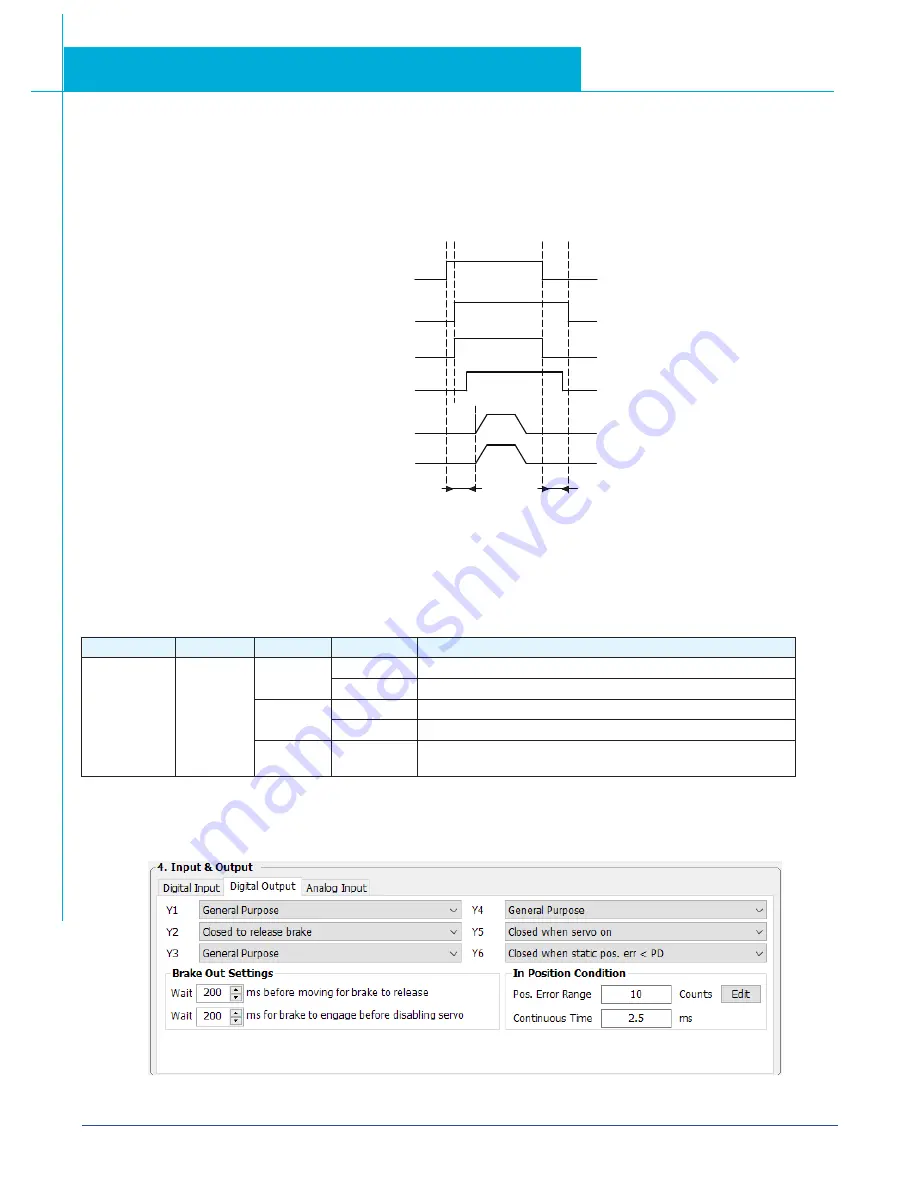
In order to prevent damage to the brake, there are delay sequences that are executed during the brake operation. Use caution when
setting up the brake operation sequence.
Servo on Input
OFF
ON
Motor Active
OFF
ON
Brake Action
OFF
ON
Brake Signal
OFF
ON
Motion Command
OFF
ON
Actual Motion
OFF
ON
Brake Release Delay
P-68 Setting
Brake Engage Delay
P-69 Setting
The Brake Output (BO) setting can be configured with the SVX Servo Suite siftware or with parameter P-67 (BO) as shown in the table
below. Brake disengage delay and engage delay times can be configured via SVX Servo Suite software, or by changing parameters
P-69 (BD) and P-70 (BE) directly on the drive.
Name
PIN
P-67(BO)
Condition
Function
Y2
Y2+ (11)
Y2- (10)
2
Closed
Engage brake, brake holds the motor shaft
Open
Release brake, brake releases the motor shaft
1
(default)
Closed
Release brake, brake releases the motor shaft
Open
Engage brake, brake holds the motor shaft
3
(default)
General purpose input, output function disabled
Software Configuration
On the Drive Configuration page - Input & Output, select Y2 output to set up.







































































