





























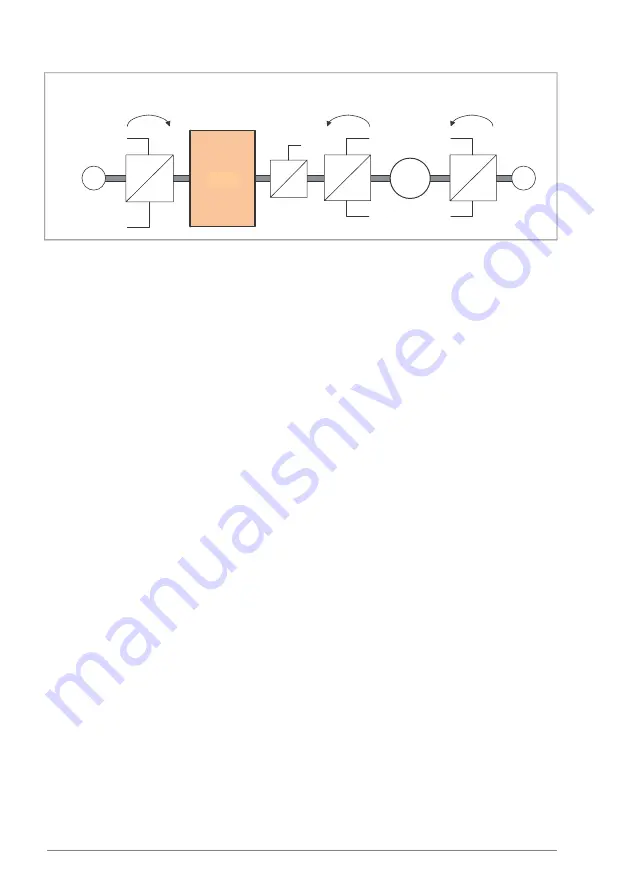
Load encoder to load
scaling
Motor to load
scaling
Motor encoder to
motor scaling
Load encoder
Motor
encoder
Load
90.53
90.54
90.61
90.62
90.43
90.44
X
Y
Y
Y
Y
X
X
X
e
e
M
1
Any gear ratio between the load encoder and the load is defined by
and
. Similarly, any gear ratio between the motor encoder and the motor is defined
by
and
. In case the internal estimated position is chosen as load
feedback, the gear ratio between the motor and load can be defined by
and
. By default, all of the ratios mentioned above are 1:1. The ratios can only be
changed with the drive stopped; new settings require validation by
.
Position counter
The control program contains a position counter feature that can be used to
indicate the position of the load. The output of the counter function, parameter
, indicates the scaled number of revolutions read from the selected source
(see section
).
The relation between revolutions of the motor shaft and the translatory movement
of the load (in any given unit of distance) is defined by parameters
and
This gear function can be changed without the need of a parameter refresh or
position counter reinitialization – however, the counter output is only updated
after new position input data is received.
For detailed parameter connections of the load feedback function, see the block
diagram on page
.
94 Program features
Содержание ACS880 Series
Страница 1: ... ABB INDUSTRIAL DRIVES ACS880 ESP control program option N5600 Firmware manual ...
Страница 2: ......
Страница 4: ......
Страница 16: ...16 ...
Страница 22: ...22 ...
Страница 24: ...24 ...
Страница 44: ...44 ...
Страница 66: ...66 ...
Страница 148: ...148 ...
Страница 167: ...Fieldbus control macro This application macro is not supported by the current firmware version Application macros 167 ...
Страница 168: ...168 ...
Страница 704: ...704 ...
Страница 728: ...728 ...
Страница 742: ...742 ...
Страница 762: ...762 ...





















































