





























5-
29
5
T
wo-robot setting
2. Operations and data when using the two-robot setting
2. Carrier 1 setting
3. Carrier 2 setting
The collision prevention settings are specified in a carrier-specific manner.
2-1) Use the cursor up/down (
↑
/
↓
) keys to select "2. Carrier 1" or "3. Carrier 2",
then press the
F 1
(EDIT) key.
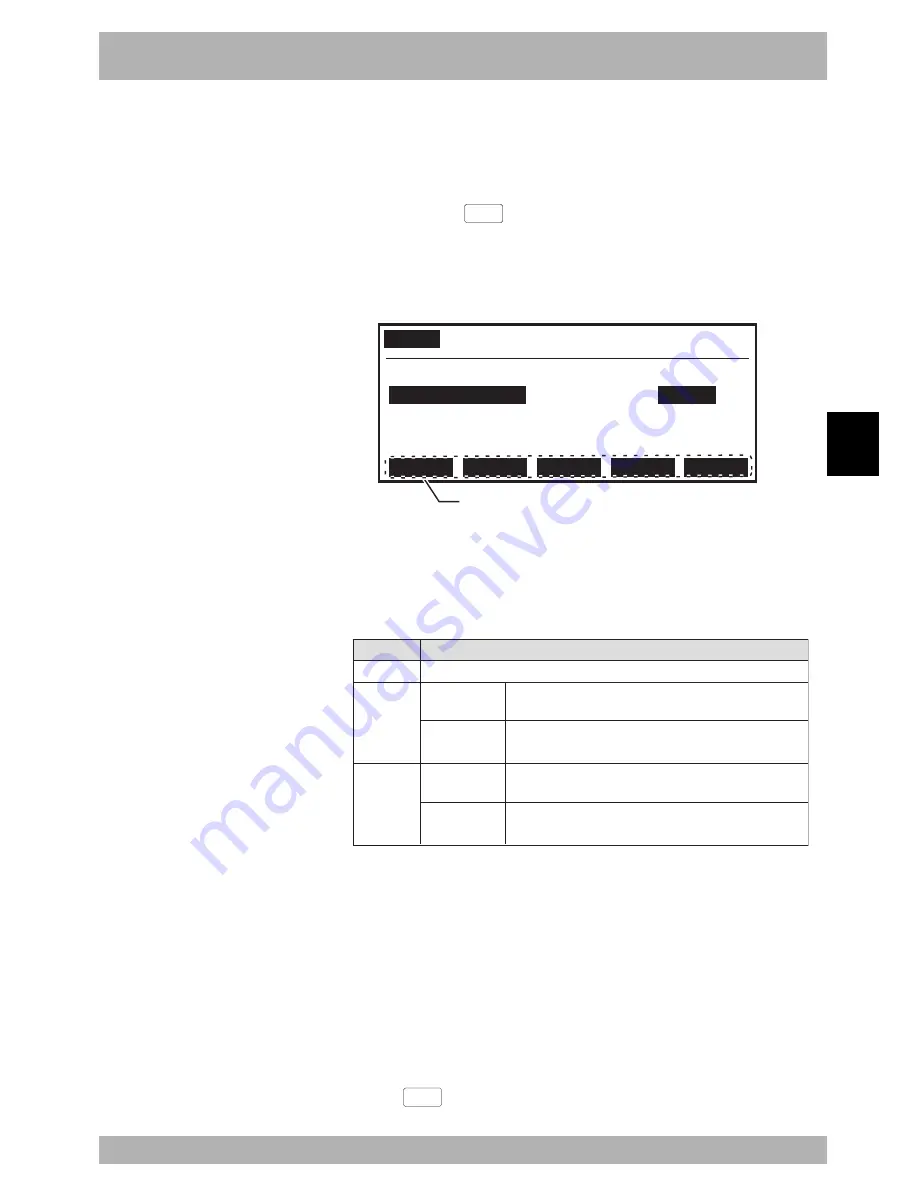
2-2) Use the function keys to select the carrier where the collision prevention
function is to be applied.
Fig. 5-2-47 Carrier setting
SYSTEM
>OPTION>W.CARRIER
V8.66
1.Stroke[mm]
650.00
2.
Carrier1
M1
3.Carrier2
M2
4.Controll mode
OFF
M1
M2
S1
S2
The menu content varies according to the robot and axis settings.
M? ...Main robot axis
m? ...Main auxiliary axis
S? ...Sub robot axis
s? ...Sub auxiliary axis
* "?" denotes the axis number
4. Control mode setting
These settings specify the collision prevention function's control content.
Setting
OFF
Warning
ON
During Manual
movement
During auto
operation
During Manual
movement
During auto
operation
Stops a carrier moving toward the other carrier before
reaching that carrier.
Program operation "error stop" occurs during auto
operation when the target position of one carrier will
interfere with the other carrier.
Stops a carrier moving toward the other carrier before
reaching that carrier.
If the target position of one carrier will interfere with the
other carrier during auto operation, the carrier stands by
until interference-free motion is possible.
Function
Anti-collision function is disabled.
* The “manual movement” and “auto operation” conditions indicated in the above table are defined as
shown below
During Manual movement:
• Manual movement at MPB
• Jog and inching movement by I/O commands
• Jog and inching movement by online commands
• Jog and inching movement by remote commands
During auto operation:
• During “AUTO” mode program operation (including “step” and “next” execution)
• MOVE, MOVEI, Pallet motion by I/O commands
• Motion by online commands executed independently by robot language (including Return-to-
origin command)
• MOVE, MOVEI, DRIVE, DRIVEI, Pallet motion by remote commands
• Direct motion command execution by MPB
2-1) Use the cursor up/down (
↑
/
↓
) keys to select "4. Control Mode", then press
the
F 1
(EDIT) key.
n
NOTE
• The double-carrier collision
prevention is disabled when in an
"origin incomplete" condition,
regardless of the specified setting.
• During automatic operation with
the control mode ON, operation is
stopped as an error "2.27 W.
carrier deadlock" error when one
carrier attempts to move to a
position where it will interfere
with the other carrier that is ready
to move.
Summary of Contents for RCX142
Page 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E92 Ver 1 09 RCX142 ...
Page 2: ......
Page 18: ...MEMO ...
Page 24: ...1 6 MEMO ...
Page 26: ...MEMO ...
Page 36: ...MEMO ...
Page 300: ...4 238 MEMO ...
Page 302: ...MEMO ...
Page 336: ...MEMO ...
Page 360: ...6 24 MEMO ...
Page 362: ...MEMO ...
Page 374: ...MEMO ...
Page 384: ...8 10 MEMO ...
Page 386: ...MEMO ...
Page 394: ...MEMO ...