





























5-
22
T
wo-robot setting
5
2. Operations and data when using the two-robot setting
2.2.8.4
Absolute reset on all axes
This function performs an absolute reset on all the controller axes. This absolute reset is
performed in the following axis order:
q
Absolute reset executed at the current position of all "mark method" axes (operation
order 2 to 3).
w
Absolute reset executed in accordance with the robot parameter's Return-to-origin
order for "stroke end method / sensor method" axes (operation order 4 to ...).
[Procedure]
1) In the MANUAL>RST.ABS mode, press the
F 11
(ALL) key to establish the "all
axes absolute reset" mode.
2) The "mark method" axes are highlighted.
Use the cursor up/down (
↑
/
↓
) keys to select the axis to be moved to the position
where the absolute reset is to occur, then use the Jog key or the
F 1
(ADJ+),
F 2
(ADJ-) keys to move the axis to that position.
When moving to the position for an absolute reset, be sure that the machine
reference display is within the 44 to 56 range.
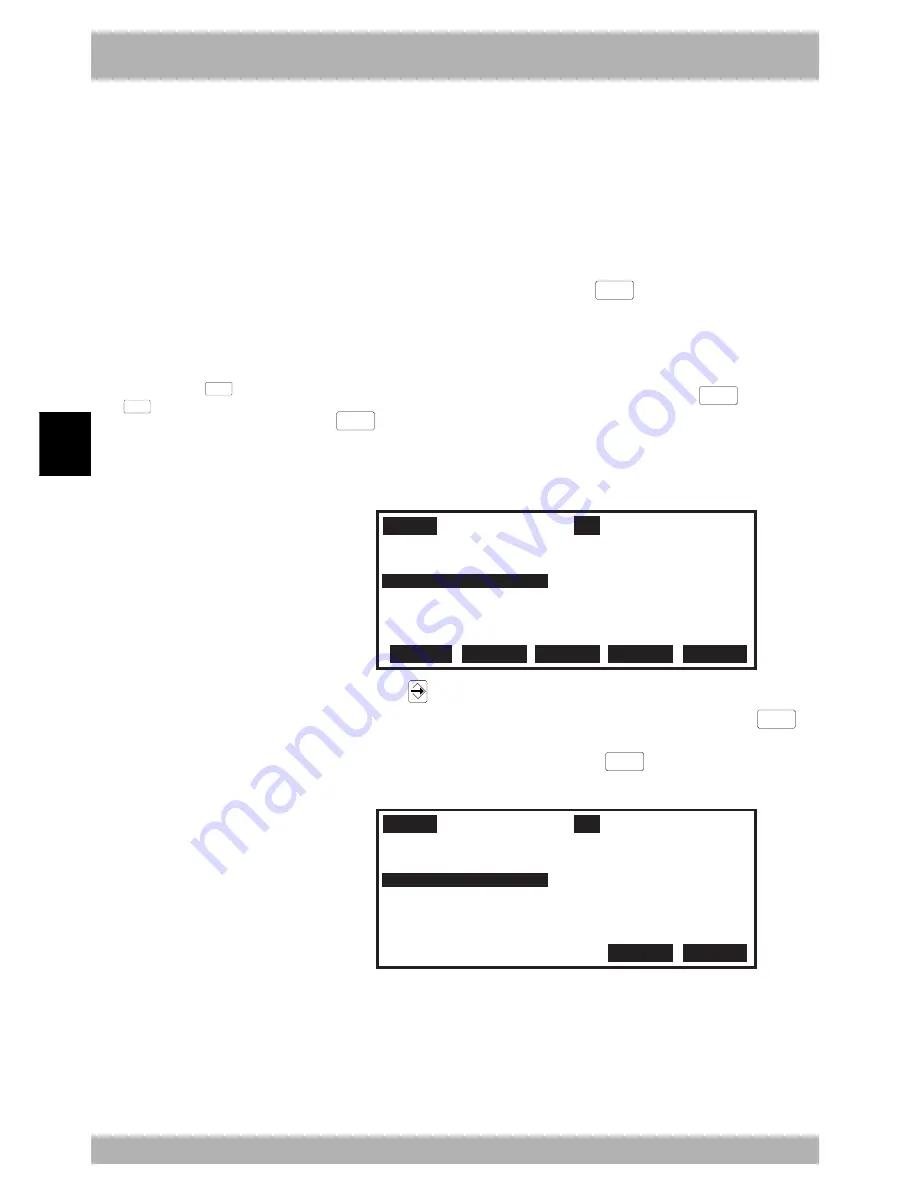
Fig. 5-2-35 All axes absolute reset
ADJ.+
MANUAL
>RST.ABS>ALL
Align axes with MARK, & Press ENTER.
M1
= NG / 61%
M2
= NG /
S1
= NG /
TORQUE
TORQUE
TORQUE
S2
= OK /
ADJ.-
VEL+
VEL-
––––––––––––––––––––––––––––––––––––––––––
50
/ 50%[MG][SOHOJ]
3) Pressing the
key displays a confirmation message on the guidance line.
To perform the absolute reset for the "mark method" at all axes, press the
F 4
(YES) key at this time.
To abort the absolute reset operation, press the
F 5
(NO) key.
Fig. 5-2-36 All axes absolute reset
Reset ABS OK?
MANUAL
>RST.ABS>ALL
Align axes with MARK, & Press ENTER.
M1
= NG / 50%
M2
= NG /
S1
= NG /
TORQUE
TORQUE
TORQUE
S2
= OK /
YES
NO
––––––––––––––––––––––––––––––––––––––––––
50
/ 50%[MG][SOHOJ]
n
NOTE
For "Absolute reset on all axes"
details, also see "11.8.3 Absolute reset
on all axes" in Chapter 4.
w
WARNING
Robot motion occurs when the
Jog key or the
F 1
(ADJ+),
F 2
(ADJ-) keys are pressed.
To ensure safety, be sure to stay
out of the robot motion range at
this time.
w
WARNING
Slight robot motion occurs when
an absolute reset is performed
in a "Servo ON" condition. To
ensure safety, be sure to stay
out of the robot motion range at
this time.
c
CAUTION
Emergency stop might be triggered if
return-to-origin is simultaneously
performed on three or more axes
whose return-to-origin method is the
stroke end detection method. In this
case, change the setting so that stroke
end return-to-origin is simultaneously
performed on two axes or is
performed separately on each axis.
Summary of Contents for RCX142
Page 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E92 Ver 1 09 RCX142 ...
Page 2: ......
Page 18: ...MEMO ...
Page 24: ...1 6 MEMO ...
Page 26: ...MEMO ...
Page 36: ...MEMO ...
Page 300: ...4 238 MEMO ...
Page 302: ...MEMO ...
Page 336: ...MEMO ...
Page 360: ...6 24 MEMO ...
Page 362: ...MEMO ...
Page 374: ...MEMO ...
Page 384: ...8 10 MEMO ...
Page 386: ...MEMO ...
Page 394: ...MEMO ...