





























125
CHAPTER 6 - DETAILED PARAMETER DESCRIPTION
Range
[Factory Setting]
Parameter
Unit
Description / Notes
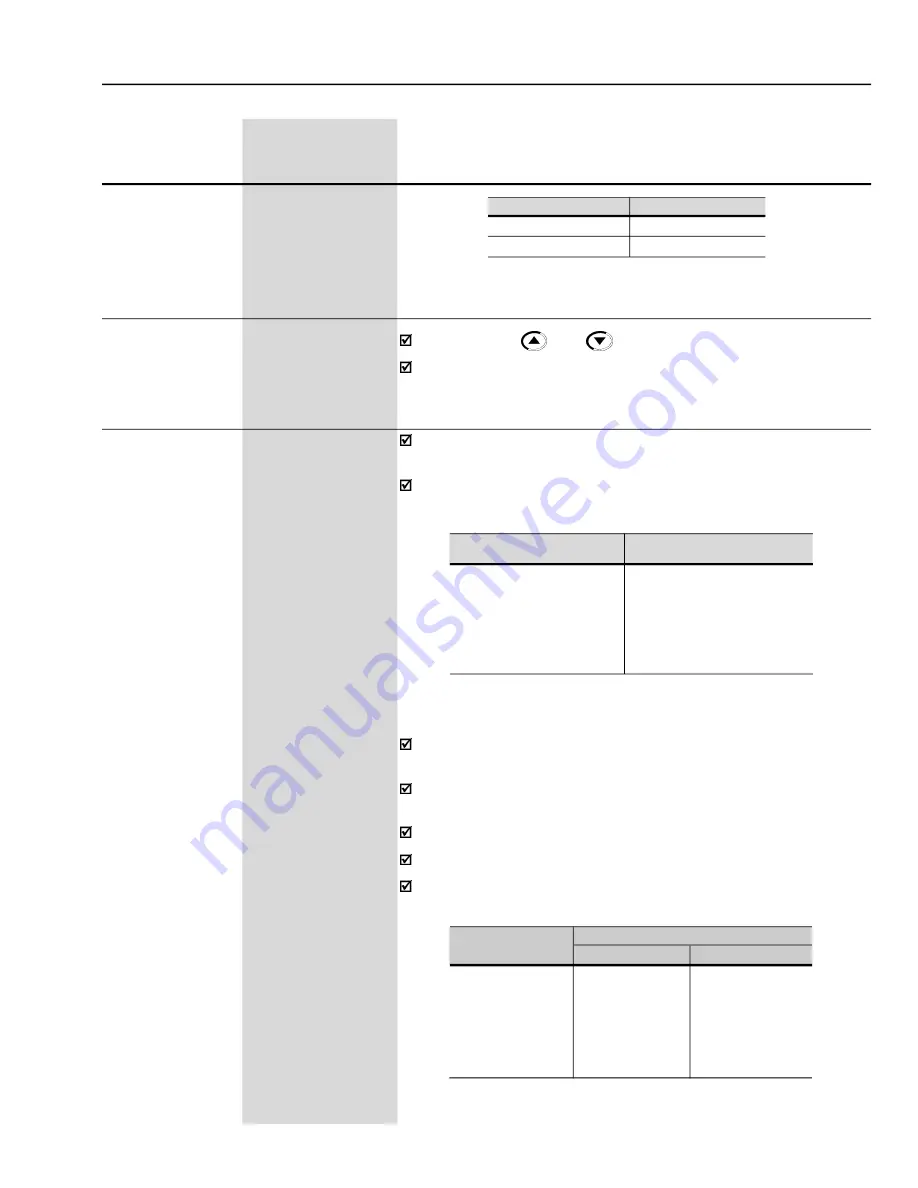
P121
P133 to P134
Keypad Speed
[ 90 ]
Reference
1 rpm
To activate the
and
active: P221 = 0 or P222 = 0.
With P120 = 1 (On) the content of P121 is maintained (backup) even
when the inverter is disabled or turned off.
P122
(2)(11)
0 to P134
JOG or JOG+
[ 150 (125) ]
Speed Reference
1 rpm
P123
(2)(11)
0 to P134
JOG - Speed
[ 150 (125) ]
Reference
1 rpm
The JOG command source is defined at P225 (Local Mode) or P228
(Remote Mode).
If the JOG command is selected for DI3 to DI8, one of the Digital Inputs
must be programmed as follows:
Digital Input
Parameters
DI3
P265 = 3 (JOG)
DI4
P266 = 3 (JOG)
DI5
P267 = 3 (JOG)
DI6
P268 = 3 (JOG)
DI7
P269 = 3 (JOG)
DI8
P270 = 3 (JOG)
Digital Inputs
Parameters
JOG+
JOG-
DI3
P265 = 10
P265 = 11
DI4
P266 = 10
P266 = 11
DI5
P267 = 10
P267 = 11
DI6
P268 = 10
P268 = 11
DI7
P269 = 10
P269 = 11
DI8
P270 = 10
P270 = 11
Table 6.3
- JOG Command selected by digital input
Table 6.4
- JOG+ and JOG- command selection
During the JOG command, the motor accelerates to the value defined
at P122, following the acceleration ramp setting.
The direction of rotation is defined by the Forward/Reverse function (P223
or P226).
JOG is effective only with the motor at standstill.
The JOG+ and JOG- commands are always via Digital Inputs.
One DIx must be programmed for JOG+ and another for JOG- as follows:
P120
Backup
0
Off
1
On
Table 6.2
- Speed reference backup







































































