





























- 210 -
7-3
Description of Functions
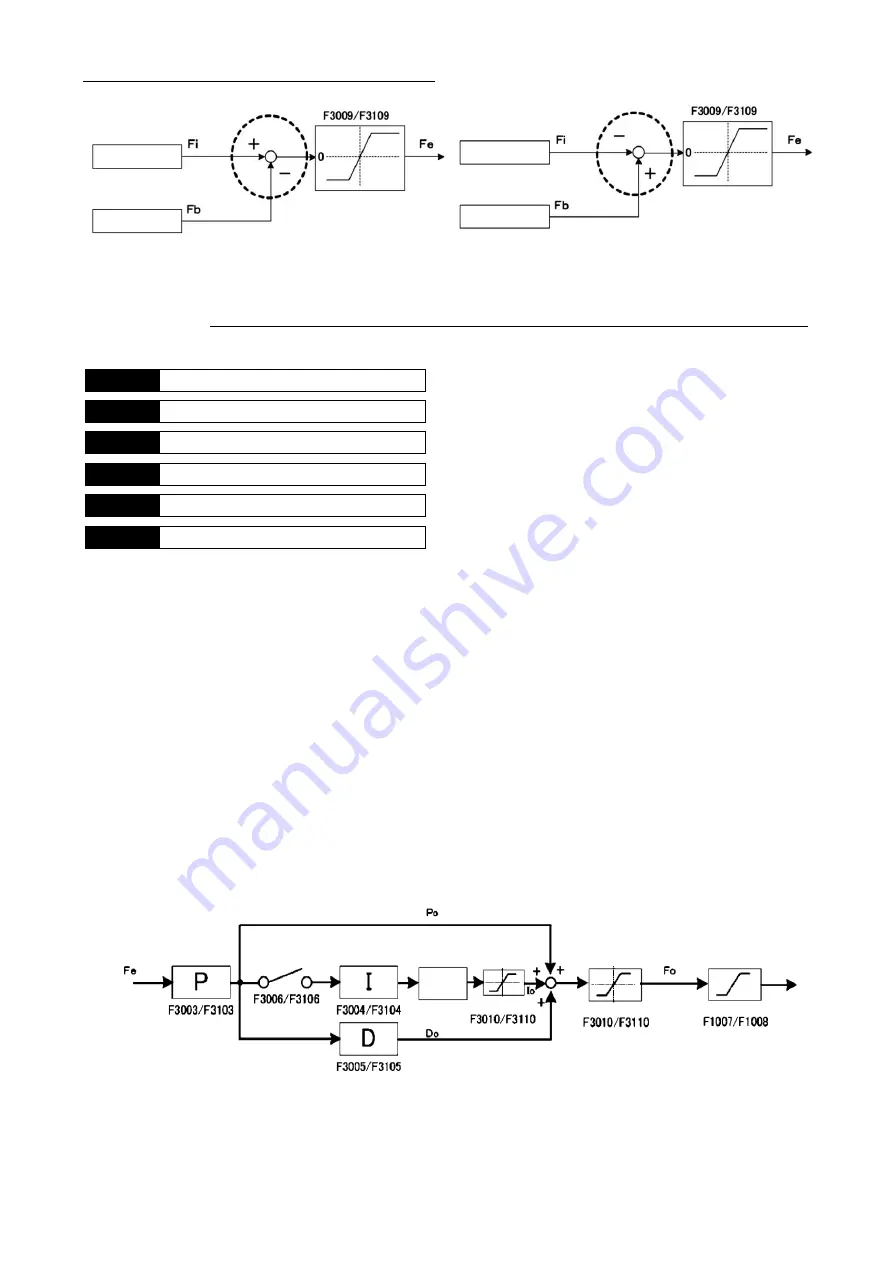
Positive
Positive
PID command value
PID command value
Negative
Negative
Note 1:
Since deviation Fe is calculated by command value – feedback value, the polarity reversion will not be
carried out when F3011/F3111=1. When deviation operation is used for reversed polarity, set F3011/F3111=2.
Note
2:
When F3011/F3111=2, the PID control output will be made towards increase by inverter stop action. When
the system cannot be stopped, set F3124: PID end mode selection=1:, direct end mode for stop action.
【
PID Operation
】
F3003
PID1 control proportional gain
F3103
PID2 control proportional gain
F3004
PID1 control integral time
F3104
PID2 control integral time
F3005
PID1 control differential time
F3105
PID2 control differential time
The function to make a PID operation for deviation value of command value and feedback value.
● Adjustment of PID control proportional gain
· F3003/F3103=0
-
100: used when adjusting the proportional gain.
To output a control value which is proportional to the deviation value. However, the deviation cannot be
cleared by only P control. Please make an adjustment within a stable scope and make sure there is no vibration
during the control.
● Adjustment of PID control integral time
· F3004/F3104=0.01
-
100 second(s): used when adjusting the integral time.
After an integral action, the deviation value will be output as the control value, it is effective for deviation
clearing. However, the response to fast changes will be slowed down.
Since static difference only exists in P control, it will be used together with integral control.
In order to make a fast stabilization, the integral time should be set short. When there is an over-adjustment, the
time must be set much longer.
● Adjustment of PID control differential time
· F3005/F3105=0.01
-
100 second(s): used when adjusting the differential time.
After a differential action, the deviation value will be output as the control value. It can be used for fast
changes when the response is improved. When there is an over-adjustment, the time must be set much shorter.
The following shows the basic formation of PID control.
Deviation
value
Output limit
Output limit
PID feedback value
Deviation limit
Deviation limit
PID feedback value
: integral
separation
IHOLD/
ICLEAR terminal
Integral value
Keep/Clear
Control
output
Output limit
Output
frequency
Summary of Contents for SVCO6
Page 1: ...High Performance Vector Control Inverter Instruction Manual SANKEN ELECTRIC CO LTD ...
Page 2: ......
Page 324: ... 322 Memorandum ...
Page 325: ......