





























Chapter 4: System Cable Installation
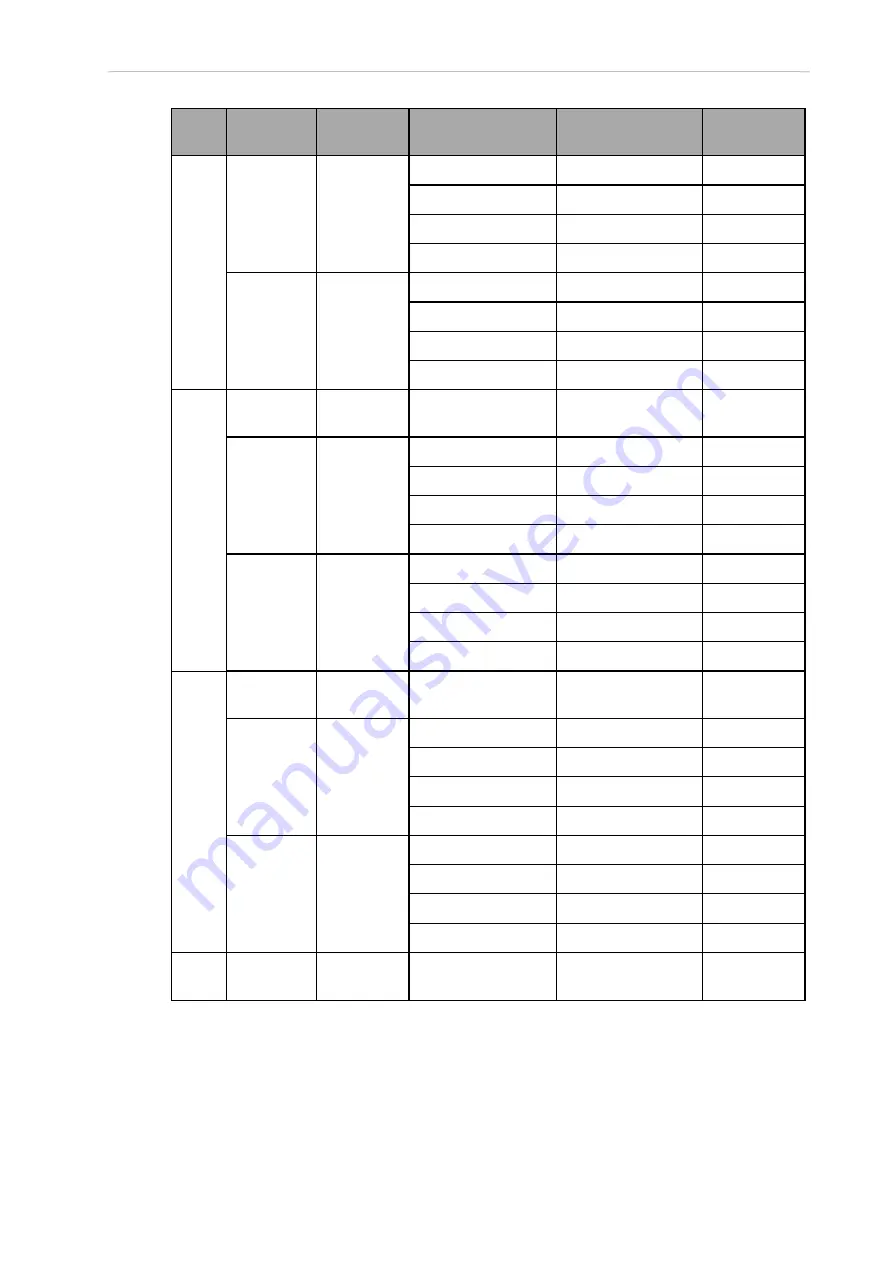
Robot Connector
Channel
Switch Position
(1, 2)
Type
Signal
Number
EXPIO
IOBlox
Group 1
OFF, OFF
Outputs on IOBlox 1 225 to 232
ON, OFF
Outputs on IOBlox 2 233 to 240
OFF, ON
Outputs on IOBlox 3 241 to 248
ON, ON
Outputs on IOBlox 4 249 to 256
XBELTIO
IOBlox
Group 2
OFF, OFF
Outputs on IOBlox 5 257 to 264
ON, OFF
Outputs on IOBlox 6 265 to 272
OFF, ON
Outputs on IOBlox 7 273 to 280
ON, ON
Outputs on IOBlox 8 281 to 288
4
XIO
XIO
N/A
Outputs on the iCS-
ECAT
289 to 296
EXPIO
IOBlox
Group 1
OFF, OFF
Outputs on IOBlox 1 321 to 328
ON, OFF
Outputs on IOBlox 2 329 to 336
OFF, ON
Outputs on IOBlox 3 337 to 344
ON, ON
Outputs on IOBlox 4 345 to 352
XBELTIO
IOBlox
Group 2
OFF, OFF
Outputs on IOBlox 5 353 to 360
ON, OFF
Outputs on IOBlox 6 361 to 368
OFF, ON
Outputs on IOBlox 7 369 to 376
ON, ON
Outputs on IOBlox 8 377 to 384
5
XIO
XIO
N/A
Outputs on the iCS-
ECAT
385 to 392
EXPIO
IOBlox
Group 1
OFF, OFF
Outputs on IOBlox 1 417 to 424
ON, OFF
Outputs on IOBlox 2 425 to 432
OFF, ON
Outputs on IOBlox 3 433 to 440
ON, ON
Outputs on IOBlox 4 441 to 448
XBELTIO
IOBlox
Group 2
OFF, OFF
Outputs on IOBlox 5 449 to 456
ON, OFF
Outputs on IOBlox 6 457 to 464
OFF, ON
Outputs on IOBlox 7 465 to 472
ON, ON
Outputs on IOBlox 8 473 to 480
6
XIO
XIO
N/A
Outputs on the iCS-
ECAT
481 to 488
24402-000 Rev B
eCobra 600 and 800 Robots with EtherCAT
75


























































