


























12
eCobra 600 and 800 Robots with EtherCAT
24402-000 Rev B
1.2 Robot Overview
The robots detailed in this manual are four-joint Selective Compliance Assembly Robot Arm
(SCARA) industrial robots. These next-generation robots are designed for a variety of auto-
mated applications where high speed and precision is required.
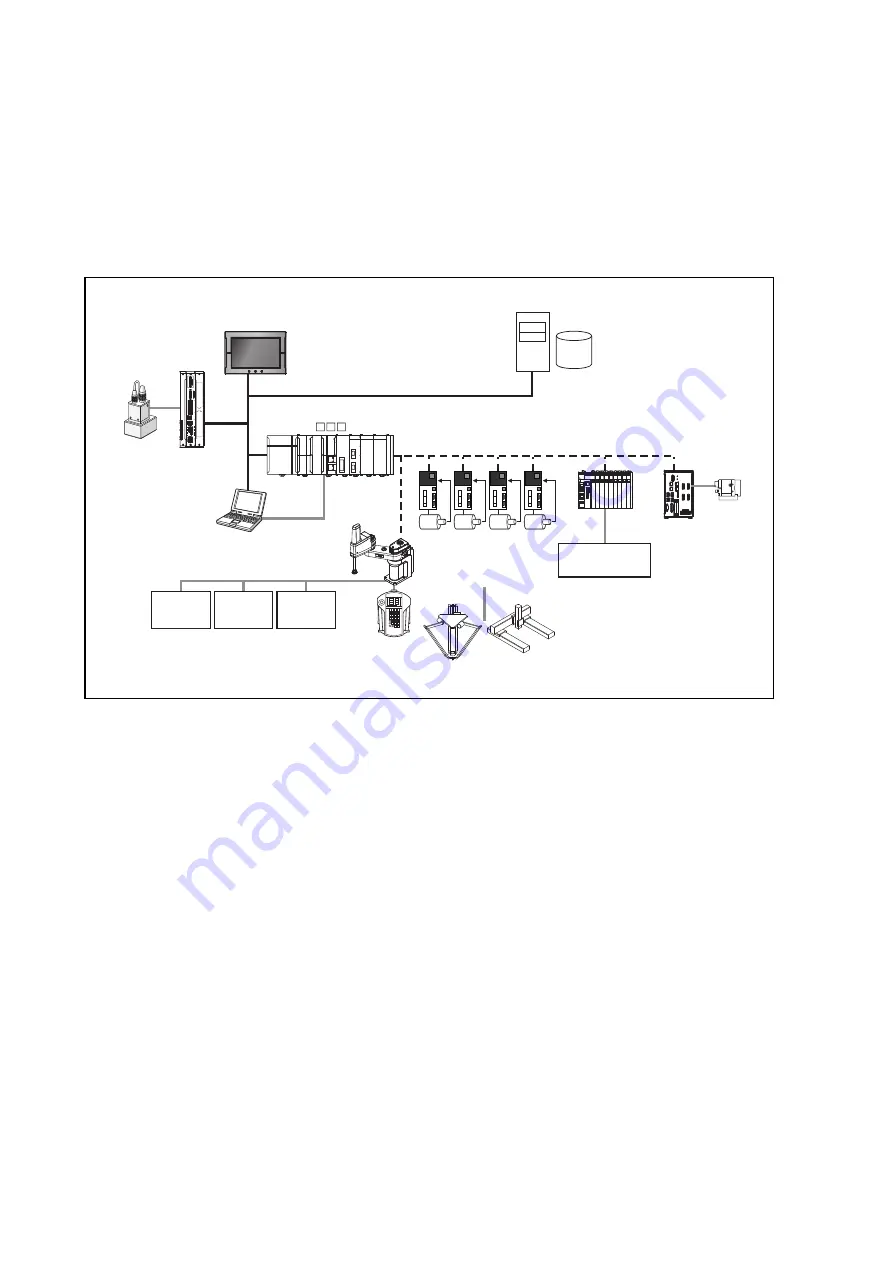
Built-in EtherCAT communications allow this robot to operate together with EtherCAT slaves,
other Sysmac products, and the Sysmac Studio Automation Software to achieve optimum func-
tionality and ease of operation.
NA-series
PT
Teaching pendant
T20
(with built-in EtherCAT
communications)
Slave
Terminal
Vision sensor
OMRON
robot
Robot Integrated CPU Unit
NJ501-R
I/O control
external devices
1S-series Servo Drives
G5-series Servo Drives
Server
Relational database
USB
Camera
FH-series Vision
Systems
Robots controllable by NJ Robotics function
EtherCAT
Application Controller
Sysmac Studio
EtherNet/IP
Front Panel
Safety
devices
Encoder,
digital I/O
Figure 1-1. EtherCAT System Topology
These robots are offered with two different arm reaches to provide different working envelopes.
The eCobra 600 Robot has a 600 mm radial reach and the eCobra 800 Robot has an 800 mm
radial reach, measured from Joint 1 to Joint 4. Refer to Robot Physical Dimension Drawings on
page 131







































































